Task-space Synergies for Reaching using Upper-limb Prostheses Experimental Data (2020)
- Citation Author(s):
-
Ricardo Garcia-Rosas
 (The University of Melbourne)
Denny Oetomo (The University of Melbourne)Chris Manzie (The University of Melbourne)Ying Tan (The University of Melbourne)Peter Choong (The University of Melbourne)
(The University of Melbourne)
Denny Oetomo (The University of Melbourne)Chris Manzie (The University of Melbourne)Ying Tan (The University of Melbourne)Peter Choong (The University of Melbourne) - Submitted by:
- Ricardo Garcia Rosas
- Last updated:
- DOI:
- 10.21227/jc0p-dj71
- Data Format:
- Research Article Link:
- Links:
 453 views
453 views
- Categories:
- Keywords:
Abstract
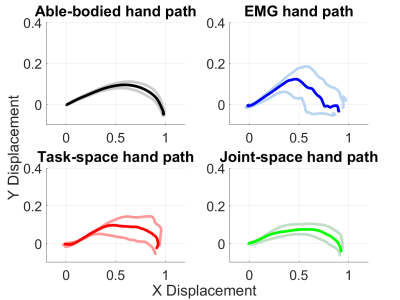
Synergistic prostheses enable the coordinated movement of the human-prosthetic arm, as required by activities of daily living. This is achieved by coupling the motion of the prosthesis to the human command, such as residual limb movement in motion-based interfaces. Previous studies demonstrated that developing human-prosthetic synergies in joint-space must consider individual motor behaviour and the intended task to be performed, requiring personalisation and task calibration. In this work, an alternative synergy-based strategy, utilising a synergistic relationship expressed in task-space, is proposed. This task-space synergy has the potential to replace the need for personalisation and task calibration with a model-based approach requiring knowledge of the individual user’s arm kinematics, the anticipated hand motion during the task and voluntary information from the prosthetic user. The proposed method is compared with surface electromyography-based and joint-space synergy-based prosthetic interfaces in a study of motor behaviour and task performance on able-bodied subjects using a VR-based transhumeral prosthesis. Experimental results showed that for a set of forward reaching tasks the proposed task-space synergy achieves comparable performance to joint-space synergies and superior to conventional surface electromyography. Case study results with an amputee subject motivate the further development of the proposed task-space synergy method.
Instructions:
Task-space synergy comparison data-set for the experiments performed in 2019-2020.
Directory:
- Processed: Processed data from MATLAB in ".mat" format. Organised by session and subject.
- Raw: Raw time-series data gathered from sensors in ".csv" format. Each file represents a trial where a subject performed a reaching task. Organised by subject, modality and session. Anonymised subject information is included in a ".json" file.
- Columns of the time-series files represent the different data gathered.
- Rows of the time-series files represent the values at the given time "t".
- Scripts: MATLAB scripts used to process and plot data. See ProcessAndUpdateSubjectData for data processing steps.