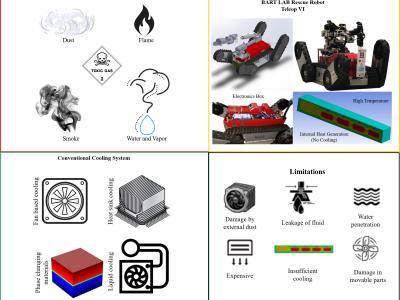
The problem of cooling in rescue robots is similar to that of the entire domain of product development involving electronic systems. When considering mission-oriented rescue robots, this issue becomes more severe, as the tolerance to failure is remarkably low. While cooling is considered indispensable, the hazardous environmental condition of the scene of deployment, comprising of water, dust, toxic gases, or fire, constrains the choices of the method.
- Categories: