First Name
Muhammad Rabani
Last Name
Mohd Romlay
Obstacle avoidance methodologies seldom work under assumption or limitation of other obstacel implying similar collision averting protocol. Furthermore, prerequisite of having perfect sensing and having central communciation are also needed in order to safely navigate witout collision. A novel obstacle avoidance method of FLC-ORCA is initiated in an attemp to fill in the void within obstacle avoidance. The proposed method is compared with other state-of-the-art tecniques such as Improved A-Star and Directional ORCA.
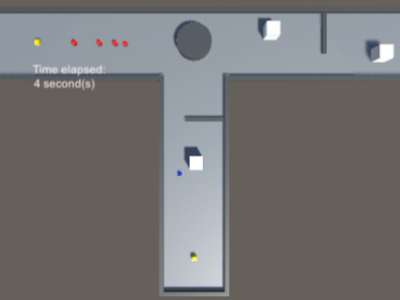
A novel FLC-ORCA obstaclea avoidance method is compared with other state-of-the-art techniques of Improved A-Star and Directional ORCA. The SLAM navigation recording are shown with comparable analysis of time taken, navigation path, rerouting occurance, and stoppage occurance. The obstacles are consist of static, dynamic and intelligent entity state of nature.
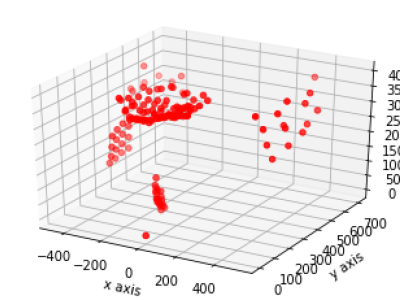
LiDAR point cloud data serves as an machine vision alternative other than image. Its advantages when compared to image and video includes depth estimation and distance measruement. Low-density LiDAR point cloud data can be used to achieve navigation, obstacle detection and obstacle avoidance for mobile robots. autonomous vehicle and drones. In this metadata, we scanned over 1200 objects and classified it into 4 groups of object namely, human, cars, motorcyclist.