SWAN 3D Point Cloud DATASET
- Citation Author(s):
-
Muhammad Ibrahim (University of Western Australia)Naveed Akhtar (University of Western Australia)Saeed Anwar (King Fahad University of Petroleum & Minerals (KFUPM))Ajmal Mian (University of Western Australia)
- Submitted by:
- Muhammad Ibrahim
- Last updated:
- DOI:
- 10.21227/cg01-8n53
- Research Article Link:
 684 views
684 views
- Categories:
Abstract
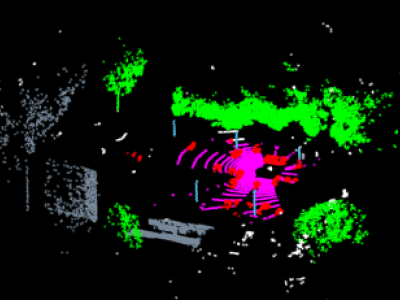
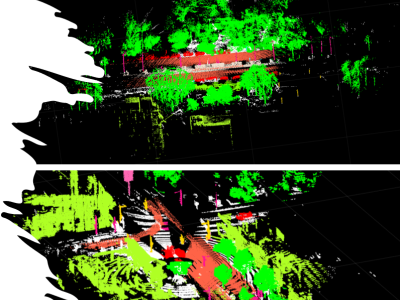
SWAN is a large-scale outdoor point cloud semantic segmentation, instance segmentation and object detection dataset. The dataset is targeted explicitly at the challenging urban environment, which aligns well with the needs of the intelligent transportation systems. The data is collected in the Central Business District (CBD) of Perth city in Australia, covering nearly 150km. It additionally used specialized equipment (portable trolley) to capture scenes of no-through roads and narrow streets. The data is acquired at various day and night times under different weather conditions by driving an SUV fitted with a 64 channels Ouster LiDAR sensor. Annotation of the data is performed with PC-Annotate tool, previously developed by the authors. Labelling was performed by 10 under-graduate students, over a period of 12 months. The proposed dataset contains more than 200k raw frames with nearly 16 billion points. It provides annotations for 24 classes for more than 10K frames, consisting of more than 0.9 billion points. This results in 366,526 labeled object instances in the dataset.
Instructions:
Swan dataset contains both labelled and raw frames. The annotated data can be utilized for supervised learning while raw frames are the best source for unsupervised learning. The dataloader is provided for labeled data written in Pytorch.