Ultra-Wideband Channel State Information and Localization for Physical Layer Security
- Citation Author(s):
-
Paul Walther (TU Dresden)Robert Knauer (TU Dresden)Thorsten Strufe (Karlsruhe Institute of Technology)
- Submitted by:
- Paul Walther
- Last updated:
- DOI:
- 10.21227/0wej-bc28
- Data Format:
 1653 views
1653 views
- Categories:
- Keywords:
Abstract
As an alternative to classical cryptography, Physical Layer Security (PhySec) provides primitives to achieve fundamental security goals like confidentiality, authentication or key derivation. Through its origins in the field of information theory, these primitives are rigorously analysed and their information theoretic security is proven. Nevertheless, the practical realizations of the different approaches do take certain assumptions about the physical world as granted.
Many PhySec rely on the knowledge of Channel State Information (CSI) or of properties derived from CSI. Examples are wiretap codes and their respective design, key derivation based on reciprocal channel properties, and physical layer authentication. Despite the fact that many PhySec primitives rely on CSI knowledge for their functionality and security proofs, no definitive dataset is openly available that is suitable for verification and evaluation in practical scenarios. Different dataset are described for specific works, but none are released for public access.
Hence, we aim to supply a dataset providing real world measurement of channel characteristics in relevant use case scenarios. With this dataset published here, we want to enable the research community to examine the underlying assumptions of PhySec in more detail, as well as provide a way to verify and support theoretical models and approaches with concrete data.
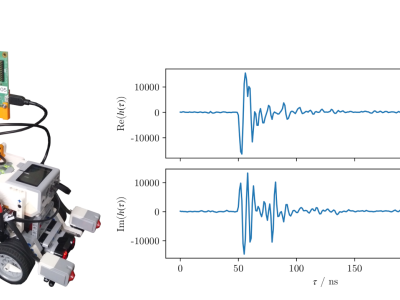
This dataset consists of Ultra-Wideband (UWB) Channel State Information accompanied with the respective location information of the participating terminals. Since we additionally want to enable analysis with regard to security, two eavesdroppers are integrated in each measurement setup, whose observation is also recorded and provided. All measurements are conducted with consumer grade hardware to demonstrate the relevance for actual practical use case.
To facilitate the unsupervised recording of measurements and thereby allow for long running measurements, we build an robot base moving autonomously within the measurement environment. Thereby, we were able to record measurements for about 112 hours, acquiring 1.2 million samples, making this dataset also suitable for machine learning methods.
Instructions:
The data is provided as zipped NumPy arrays with custom headers. To load an file the NumPy package is required.
The respective loadz primitive allows for a straight forward loading of the datasets.
To load a file “file.npz” the following code is sufficient:
import numpy as np
measurement = np.load(’file.npz ’, allow pickle =False)
header , data = measurement [’header ’], measurement [’data ’]
The dataset comes with a supplementary script example_script.py illustrating the basic usage of the dataset.






