Federated Learning: mmWave MIMO radar dataset for testing
- Citation Author(s):
-
Stefano Savazzi
 (Consiglio Nazionale delle Ricerche CNR-IEIIT)
(Consiglio Nazionale delle Ricerche CNR-IEIIT)
- Submitted by:
- Stefano Savazzi
- Last updated:
- DOI:
- 10.21227/0wmc-hq36
- Data Format:
- Links:
 3049 views
3049 views
- Categories:
- Keywords:
Abstract
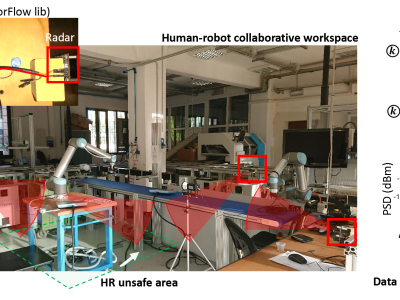
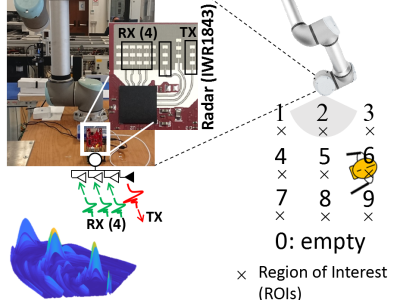
The database contains the raw range-azimuth measurements obtained from mmWave MIMO radars (IWR1843BOOST http://www.ti.com/tool/IWR1843BOOST) deployed in different positions around a robotic manipulator. Data has been collected inside a workspace environment. The data is used to train a machine learning model for the detection of a human operator placed in different positions (see the image). The Python code examples (on github link) use the data for federated learning.
Instructions:
The database that contains the raw range-azimuth measurements obtained from mmWave MIMO radars inside a Human-Robot (HR) workspace environment.
The goal of the training task is to learn a ML model for the detection (classification) of the position of the human operators sharing the workspace, namely the human-robot distance and the direction of arrival (DOA). In particular, we address the detection the human subject in 10 region of interest (ROI), including the one referring to the subject outside the monitored area (class labelled as 0): these are detailed in the Figure. The proposed federated training scenario resorts to a network of 9 physical devices. For testing a continual learning setup, the training data are collected independently by each device over three consecutive days (day 0, day 1, day 2).
Python Code: for federated learning (FL) implementation please use the code in https://github.com/labRadioVision/Federated_Learning_MQTT and follow instructions therein
Training data
For day i (i=0,1,2), the database training_data_range_azimuth_day(i) contains 9 structures (mmwave_data_train_k.mat) that contain the data collected by device k, k=1,...,9 (9 devices) . Each mat file for the k-th device contains two sets:
i) mmwave_data_train_k: has dimension 900 x 256 x 63. Contains 250 FFT range-azimuth measurements of size 256 x 63 collected by device k: 256-point range samples corresponding to a max range of 11m (min range of 0.5m) and 63 angle bins, corresponding to DOA ranging from -75 to +75 degree. These data are used for training, might be combined with data collected by other devices.
ii) label_train_k: contains the corresponding labels. Each label (from 0 to 9) corresponds to one of the 10 positions (from 1 to 9) of the operator as detailed in the image attached. Empty space (subject outside the area) has label 0
Test data
For day i (i=0,1,2), the database test_data_range_azimuth_day(i) contains the file mmwave_data_test.mat with the test data for validate the training at day i . Each mat file contains two sets:
i) mmwave_data_test: has dimension 250 x 256 x 63. Contains 1000 FFT range-azimuth measurements of size 256 x 63: 256-point range samples corresponding to a max range of 11m (min range of 0.5m) and 63 angle bins, corresponding to DOA ranging from -75 to +75 degree. These data are used for testing (validation database).
ii) label_test: contains the corresponding groun-truth labels. Each label (from 0 to 9) corresponds to one of the 10 positions (from 1 to 9) of the operator as detailed in the image attached. Empty space (subject outside the area) has label 0
iii) LABELS AND CLASSES:
Each class from 1 to 9 corresponds to a subject position in the surrounding of the robot, in particular:
CLASS (or LABEL) 1 identifies the human operator as working close-by the robot, at distance between 0.5 and 0.7 m and azimtuh 40-60 deg (positive).
CLASS 2 identifies the human operator as working close-by the robot, at distance between 0.3 and 0.5 m and azimtuh in the range -10 + 10 deg.
CLASS 3 identifies the human operator as working close-by the robot, at distance between 0.5 and 0.7 m and azimtuh 40-60 deg (negative).
CLASS 4 identifies the human operator as working at distance between 1 and 1.2 m from the robot and azimtuh 20-40 deg (positive).
CLASS 5 identifies the human operator as working close-by the robot, at distance between 0.9 and 1.1 m and azimtuh in the range -10 + 10 deg.
CLASS 6 identifies the human operator as working at distance between 1 and 1.2 m from the robot and azimtuh 20-40 deg (negative).
CLASS 7 identifies the human operator as working at distance between 1.2 and 1.6 m from the robot and azimtuh 10-20 deg (positive).
CLASS 8 identifies the human operator as working at distance between 1.1 and 1.5 m from the robot and azimtuh -5 +5 deg.
CLASS 9 identifies the human operator as working at distance between 1.2 and 1.6 m from the robot and azimtuh 10-20 deg (negative).
CLASS 0: empty space (the operator might move in the surrounding)
Dataset Files
- Continual learning - day 0: range-azimuth training data (256 range bins (Size: 527.57 MB)
- test_data_range_azimuth_day0.zip (Size: 175.53 MB)
- Continual learning - day 0: range-azimuth test data (256 range bins (Size: 264.14 MB)
- test_data_range_azimuth_day1.zip (Size: 117.05 MB)
- Continual learning - day 1: range-azimuth training data (256 range bins (Size: 264.11 MB)
- test_data_range_azimuth_day2.zip (Size: 117.05 MB)