ULTRRA Challenge 2025
- Submission Dates:
- 11/08/2024 to 02/14/2025
- Citation Author(s):
- Submitted by:
- Myron Brown
- Last updated:
- Mon, 01/27/2025 - 14:15
- DOI:
- 10.21227/2zs6-ht63
- Data Format:
- License:
- Creative Commons Attribution
 1930 Views
1930 Views- Categories:
- Keywords:
Abstract
The ULTRRA challenge evaluates current and novel state of the art view synthesis methods for posed and unposed cameras. Challenge datasets emphasize real-world considerations, such as image sparsity, variety of camera models, and unconstrained acquisition in real-world environments.
This challenge is organized as part of the WACV25 ULTRRA workshop (https://sites.google.com/view/ultrra-wacv-2025).
To get started, please register for the competition at CodaBench (https://www.codabench.org/competitions/4494) under the "My Submissions" tab and download the following development data packages here:
- ultrra25-dev-inputs: input images and metadata files for development phase challenge tasks
- ultrra25-dev-ref: reference values for self-evaluation - these will not be provided for the test phase
- ultrra25-dev-res: example baseline algorithm outputs formatted for successful leaderboard submission
- ultrra25-test-inputs: input images and metadata files for test phase challenge tasks
- ultrra25-test-res: example baseline algorithm outputs formatted for successful leaderboard submission
For the development datasets, v01 is the version initially released, and v02 is a refined version that better matches the distribution of images used in the test set, with input images that are most visually similar to reference images removed. note that reference values are not provided for the test set.
A baseline algorithm and metrics code for self-evaluation are provided here (https://github.com/pubgeo/ultrra-baseline).
Submissions will be made on the CodaBench site. Questions or concerns should be posted to the CodaBench competition forum or in the comments form below.
Schedule
- Development dataset release: 11/8/2024
- Challenge dataset release: 1/10/2025
- Submission period: 11/1/2024 - 2/14/2025
- Invited presentations for selected participants: Soon after 2/14/2025
Tasks
Camera calibration
- Inputs: unposed images
- Ouputs: relative camera extrinsic parameters
- Evaluation: camera geolocation error
View synthesis
- Inputs: images with camera locations, camera metadata for requested novel image renders
- Outputs: rendered images
- Evaluation: DreamSim image similarity metric
Challenges posed for each task
- Image density: a limited number of input images from a single ground-level camera
- Multiple camera models: images from multiple unique ground-level cameras
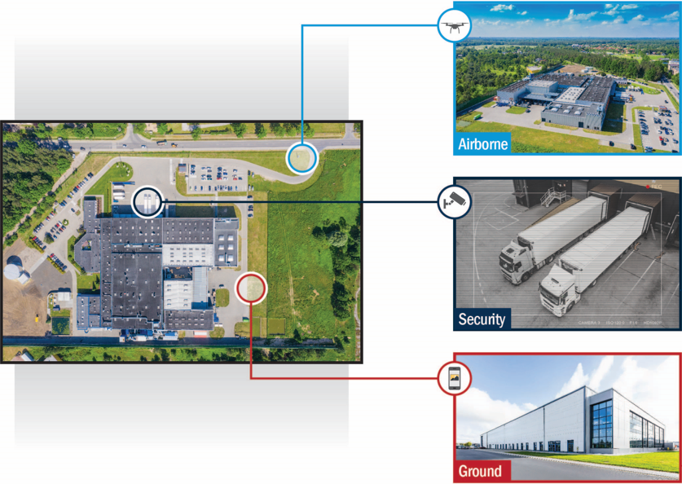
- Varying altitudes: images from ground, security, and airborne cameras
- Reconstructed area: images from varying altitudes, covering a larger area
Example datasets are provided for each task and challenge to support algorithm development. An example baseline solution is provided based on COLMAP and NerfStudio, and a baseline submission is provided to clarify the expected submission format.
Contest Data
Images collected for the IARPA WRIVA program have been publicly released and made available for use in this public challenge and more broadly to encourage research in view synthesis methods for real-world environments and heterogeneous cameras. Datasets include images collected from mobile phones and other ground-level cameras, security cameras, and airborne cameras. Each camera is calibrated using structure from motion constrained by RTK-corrected GPS coordinates, with accuracies measured in centimeters, for either camera locations or ground control points, depending on the camera. Cameras are geolocated to enable reliable evaluation. Images used for final evaluations are sequestered.
Evaluation
During the development phase, both camera calibration and view synthesis tasks will be evaluated using images from the same scene. Reference values for both tasks are provided in the development data package, allowing participants to independently experiment and self-evaluate and also confirm that submissions to the leaderboard are formatted correctly.
During the test phase, camera calibration and view synthesis tasks will be evaluated using images from different scenes, and all reference values will be sequestered.
Camera calibration task: Inputs are unposed JPG images, and outputs are relative camera poses in a JSON file format. Camera poses are evaluated by comparing relative camera locations, with contestant coordinate frames aligned to sequestered reference world coordinates using Procrustes analysis. The leaderboard metric for this task is SE90, the 90th percentile spherical error from all input images.
View synthesis task: Inputs are posed images for training a view synthesis model and test poses for rendering novel views. Sequestered images and contestant rendered images will be compared using the single-model variant of the DreamSim image similarity metric (https://dreamsim-nights.github.io/). The leaderboard metric for this task is the mean DreamSim score from all rendered images.
Terms
By participating in this challenge, you consent to publicly share your submissions.
No prizes will be awarded. Organizers will review submissions and invite top-scoring participants to submit a brief writeup of their solutions, documenting their approaches and observations. Organizers will then select from among the best scores and writeups and invite participants to present their results at the ULTRRA workshop at WACV 2025 (https://sites.google.com/view/ultrra-wacv-2025). Virtual presentations will be supported. All top-scoring participants on the leaderboard will be acknowledged at the workshop.
Additional data
In addition to contest-specific data, IARPA is releasing WRIVA program (https://www.iarpa.gov/research-programs/wriva) challenge data to further encourage public research on these topics. This data was collected by the JHU Applied Physics Laboratory and MIT Lincoln Laboratory and curated into challenge datasets by the JHU Applied Physics Laboratory and MITRE Corporation for the WRIVA program. This data is available as a separate IEEE DataPort dataset (https://ieee-dataport.org/open-access/wriva-public-data).
Acknowledgements
This work was supported by the Intelligence Advanced Research Projects Activity (IARPA) contract no. 2020-20081800401. Disclaimer: The views and conclusions contained herein are those of the authors and should not be interpreted as necessarily representing the official policies or endorsements, either expressed or implied, of IARPA or the U.S. Government.
Competition Dataset Files
| Attachment | Size |
|---|---|
| 5.27 GB | |
| 3.84 GB | |
| 120.04 MB | |
| 113.41 MB | |
| 194.76 MB | |
| 216.62 MB | |
| 2.24 GB | |
| 144.14 MB |





