camera pose estimation; 3D reconstruction; novel view synthesis
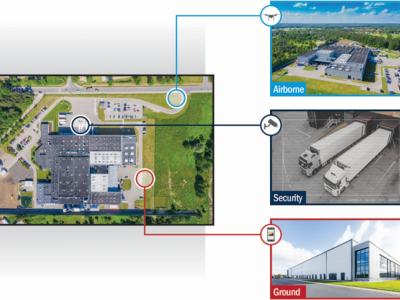
The IARPA WRIVA program aims to develop software systems that can create photorealistic, navigable 3D site models using a highly limited corpus of imagery, to include ground level imagery, surveillance height imagery, airborne altitude imagery, and satellite imagery. Additionally, where imagery lacks metadata indicating geolocation, information about camera parameters, or is corrupted by artifacts, WRIVA seeks to detect and correct these factors to incorporate the imagery in site-modelling and other downstream image processing and analysis algorithms.
- Categories:
 642 Views
642 Views