Texture Dataset
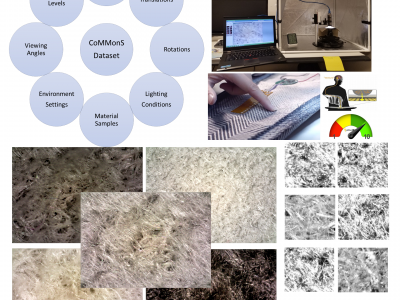
As one of the research directions at OLIVES Lab @ Georgia Tech, we focus on recognizing textures and materials in real-world images, which plays an important role in object recognition and scene understanding. Aiming at describing objects or scenes with more detailed information, we explore how to computationally characterize apparent or latent properties (e.g. surface smoothness) of materials, i.e., computational material characterization, which moves a step further beyond material recognition.
- Categories:
 990 Views
990 Views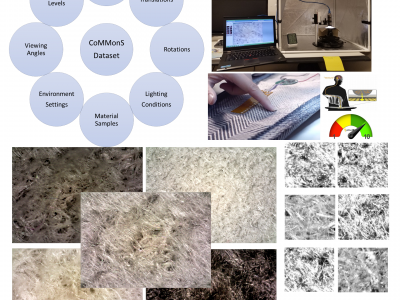
As one of the research directions at OLIVES Lab @ Georgia Tech, we focus on recognizing textures and materials in real-world images, which plays an important role in object recognition and scene understanding. Aiming at describing objects or scenes with more detailed information, we explore how to computationally characterize apparent or latent properties (e.g. surface smoothness) of materials, i.e., computational material characterization, which moves a step further beyond material recognition.
- Categories:
288 Views
Tactile perception of the material properties in real-time using tiny embedded systems is a challenging task and of grave importance for dexterous object manipulation such as robotics, prosthetics and augmented reality [1-4] . As the psychophysical dimensions of the material properties cover a wide range of percepts, embedded tactile perception systems require efficient signal feature extraction and classification techniques to process signals collected by tactile sensors in real-time.
- Categories:
2969 Views