Surface EMG

This dataset contains joint kinematics, kinetics, and EMG activity from an experimental protocol approved by the Institutional Review Board at the University of Texas at Dallas. This data was collected to evaluate the robustness of different parameterization variables during perturbations for application in robotic prosthetic legs. Ten able-bodied subjects self-selected a comfortable speed for walking on level (0 degree), +5 degree, and -5 degree inclines. Subjects walked at the self-selected speed for a minute without perturbations to produce a control dataset of unperturbed kinematics.
- Categories:
 2948 Views
2948 Views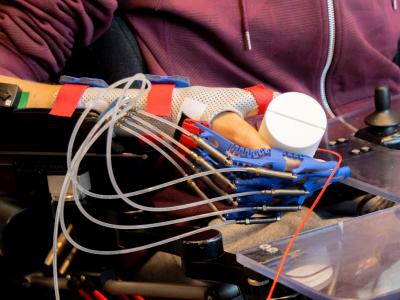
The dataset, includes raw data, observations and biometric data from our case study with an individual with DMD, controlling for the first time an active hand orthosis.
- Categories:
1271 Views
This dataset contains leg joint kinematics, kinetics, and EMG activity from an experimental protocol approved by the Institutional Review Board at the University of Texas at Dallas. Ten able-bodied subjects walked at steady speeds and inclines on a Bertec instrumented treadmill for one minute per trial. Each subject walked at every combination of the speeds 0.8 m/s, 1.0 m/s, and 1.2 m/s and inclines from -10 degrees to +10 degrees at 2.5 degree increments, for a total of 27 trials.
- Categories:
5860 Views
This repository aims to publish a sEMG database for hand gesture recongnition, which is suitable for intra-session, inter-session, inter-day and inter-subject tests. Six subjects were involved in data collection on ten days, and two sessions a day with the interval of half an hour. In each session, one trial (10 secondes) for each geature was conducted. The electrode sleeve did not reweared between two sessions in a day. The utilised sEMG device was customised by the Intelligent System and Biomedical Robotics Group, which was discussed in [1].
- Categories:
1218 Views
# ISRMyo-I: A Database for sEMG-based Hand Gesture Recognition
## Introduction
- Categories:
966 Views