Datasets
Open Access
The Effect of Walking Incline and Speed on Human Leg Kinematics, Kinetics, and EMG
- Citation Author(s):
- K. Embry, D. Villarreal, R. Macaluso, R. Gregg
- Submitted by:
- Kyle Embry
- Last updated:
- Tue, 11/12/2019 - 10:38
- DOI:
- 10.21227/gk32-e868
- Data Format:
- Links:
- License:
- Creative Commons Attribution
 5860 Views
5860 Views- Categories:
- Keywords:
Abstract
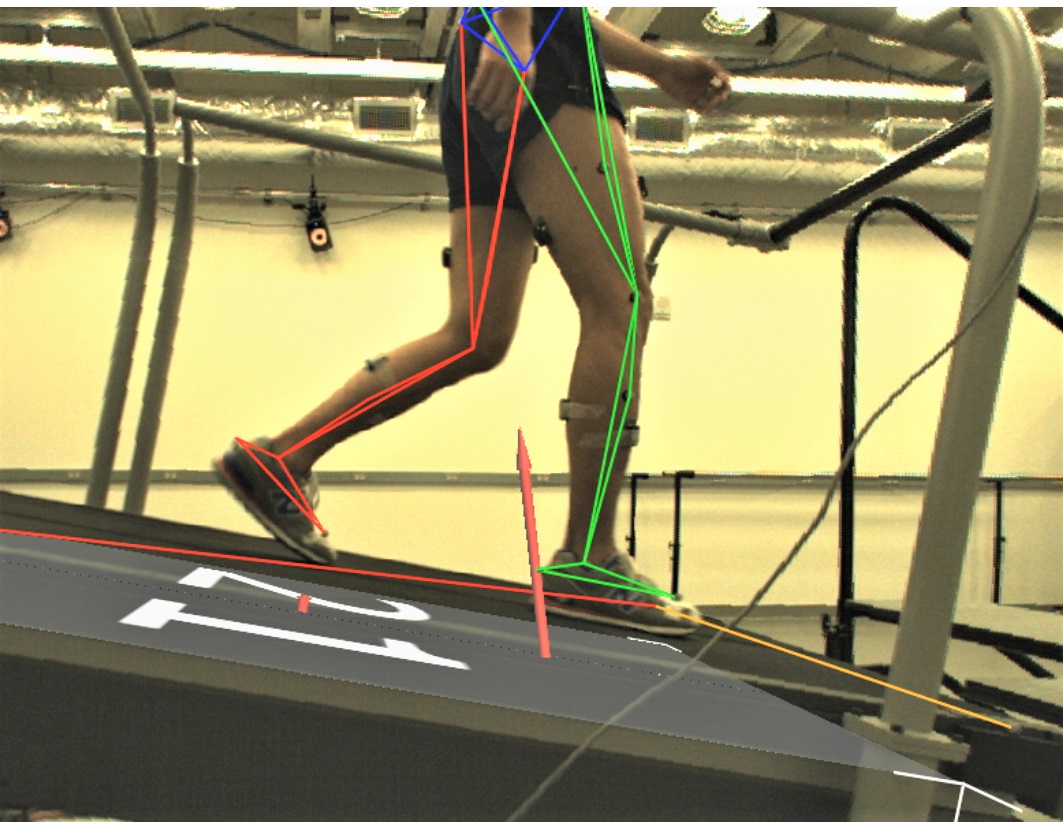
This dataset contains leg joint kinematics, kinetics, and EMG activity from an experimental protocol approved by the Institutional Review Board at the University of Texas at Dallas. Ten able-bodied subjects walked at steady speeds and inclines on a Bertec instrumented treadmill for one minute per trial. Each subject walked at every combination of the speeds 0.8 m/s, 1.0 m/s, and 1.2 m/s and inclines from -10 degrees to +10 degrees at 2.5 degree increments, for a total of 27 trials. During each trial, a 10-camera Vicon motion capture system recorded leg kinematics, while force plates in the Bertec treadmill recorded ground reaction forces, and a Delsys Trigno EMG system recorded muscle activation of the rectus femoris, biceps femoris, tibialis anterior, and gastrocnemius. This data can be used to test many hypotheses and models of human locomotion at varying speeds and inclines. This kinematic data has been used to train a predictive model that represents gait kinematics as a continuous function of gait cycle percentage, speed, and incline:
Citation:
K. Embry, D. Villarreal, R. Macaluso, and R. Gregg, “Modeling the Kinematics of Human Locomotion over Continuously Varying Speeds and Inclines,” IEEE Transactions on Neural Systems and Rehabilitation Engineering
Please see the README document for details on the available data, how it was collected, and how it has been processed.
Dataset Files
 ExampleScript ExampleScript.m (2.13 kB)
ExampleScript ExampleScript.m (2.13 kB)
Open Access dataset files are accessible to all logged in users. Don't have a login? Create a free IEEE account. IEEE Membership is not required.
Documentation
| Attachment | Size |
|---|---|
| 379.92 KB |






Comments
Thanks a lot!!
Thanks for sharing.
Thanks for sharing
may you share your code?