Multi-Object Tracking
Introduction
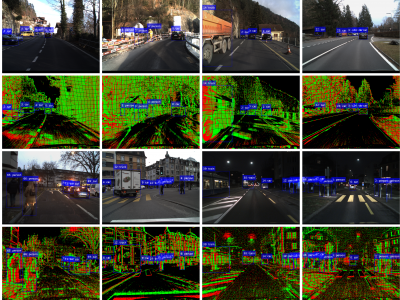
Welcome to the new challenging event-based multi-object tracking dataset (DSEC-MOT) repository. Our goal is to provide a challenging and diverse event-based MOT dataset with various real-world scenarios to facilitate the objective and comphrehensive evaluation of event-based multi-object tracking algorithms. This dataset, built upon DSEC, contains a variety of traffic entities and complex scenarios, aiming to address the current lack of event-based MOT datasets.
- Categories:
 69 Views
69 Views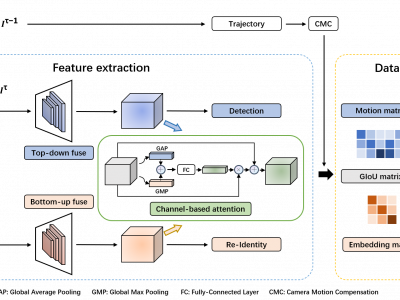
This data is presented to showcase the experimental results related to the experiments conducted in our paper. Our paper introduces a multi-object tracking algorithm, which has been evaluated on the test sets of the MOT17, MOT20, and HiEve datasets.
- Categories:
12 Views
This dataset consists of the training and the evaluation datasets for the LiDAR-based maritime environment perception presented in our journal publication "Maritime Environment Perception based on Deep Learning." Within the datasets, LiDAR raw data are processed using Deep Neural Networks (DNN). In the training dataset, we introduce the method for generating training data in Gazebo simulation. In the evaluation datasets, we provide the real-world tests conducted by two research vessels, respectively.
- Categories:
1796 Views