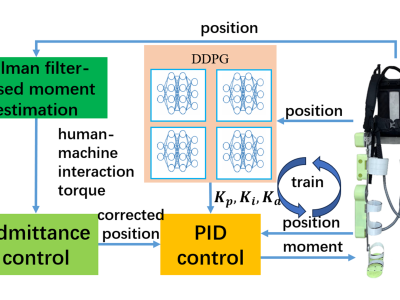
In this paper, we propose a dual-loop control strategy to address the problems of the interference by the human-machine interaction of the lower limb exoskeleton movement. The outer ring adopts admittance control and the human-machine interaction torque is estimated by the generalized momentum observer based on Kalman filter. The inner ring adopts PID control based on DDPG.
- Categories: