Human-robot Collaboration

As human-robot interaction rapidly spreads in numerous fields, the subject of robot acceptance gains increasing importance. Visual similarity to the human body, as occurs for humanoids, is generally not enough to guarantee acceptance in physical interaction, as acceptance directly links to comfort and ergonomics, which are measured in terms of the quality of the robot movement perceived by the human. This paper discusses the connection between comfort and similarity of the robot movement to the human one.
- Categories:
 120 Views
120 Views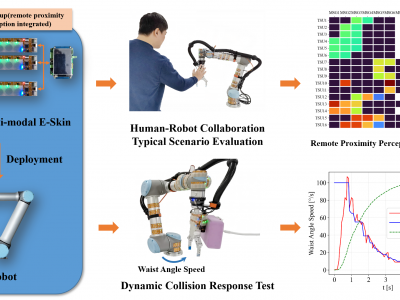
Human-Robot Collaboration (HRC) is a significant research area in robotics, and the utilization of electronic skin technology is a promising approach to ensuring the safe operation of robots in Human-Robot Collaboration (HRC) environments. This study proposed a large-area deployable, modular, scalable and trimable, multi-modal, high-speed responsive electronic skin for robots that integrated remote proximity and contact force perception.
- Categories:
188 Views