Confined Space Underwater Positioning Using Collaborative Robots
- Citation Author(s):
-
Xueliang Cheng (University of Manchester)
- Submitted by:
- Xueliang Cheng
- Last updated:
- DOI:
- 10.21227/6z0y-yf36
- Data Format:
 212 views
212 views
Abstract
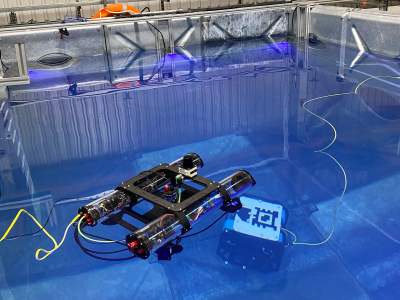
The experiments were conducted at RAICo Lab in West Cumbria. The data were real-time data collected during experiments to validate the CAP system. The underwater robot moves autonomously along three different paths, while the surface robot follows the underwater robot's movement simultaneously. The uploaded file consists of nine data sets. Three experiments were conducted for each trajectory, resulting in a total of nine datasets. The nine subsets are: Lawnmower1-3, Random1-3, and Square1-3. This dataset supports the paper titled "Confined Space Underwater Positioning Using Collaborative Robots."
Instructions:
Due to the capacity limitations of IEEE DataPort for uploading data, the following data is in .csv format, converted from the original rosbag files. If you require the raw rosbag (.bag) format data, please contact xueliang.cheng@manchester.ac.uk or xueliang.uom@gmail.com. The original rosbag contains real-time tag detection and SLAM-related data.
Description of the data
The experiments were conducted at RAICo Lab in West Cumbria. The data were real-time data collected during experiments to validate the CAP system. The uploaded file consists of nine data sets. The nine subsets are: Lawnmower1-3, Random1-3, and Square1-3.
Lawnmower: The underwater robot moves according to a preset lawnmower pattern, while the surface robot automatically follows.
Random: ...
Square: ...
Each pattern folder contains a ROS bag (.bag) file to facilitate ROS users. It can be used with a script to run the CAP system to view and reproduce our work. The ROS bag includes the following rostopics:
/imu/data: Raw IMU data/cap_cd: Real-time output of CAP-CD, coordinates of the underwater robot/cap_pnp: Real-time output of CAP-CPnP, coordinates of the underwater robot/bluerov/mavros/global_position/rel_alt: Depth sensor data from the underwater robot/qualisys/bluerov_8_points/pose: Qualisys tracking underwater robot (Ground truth)/slam_out_pose: Output from Hector SLAM of the surface robot, x, y coordinates and yaw (in quaternion form)/tag_detections: EPnP solved pose of AprilTag in the camera/tag_detections_image: Camera view (images)/tag_detections_raw: Pixel coordinates of the four corners of the detected AprilTag
To facilitate plotting, rostopics other than images have also been converted into .csv format files.
/imu/data-> imu.csv/cap_cd-> capcd_online.csv/cap_pnp-> cappnp_online.csv/bluerov/mavros/global_position/rel_alt-> depth_sensor.csv/qualisys/bluerov_8_points/pose-> qualisys.csv/slam_out_pose-> slam.csv/tag_detections-> apriltag_pnp.csv/tag_detections_raw-> corners.csv
Code/Software
The code was written in Python and uploaded in the format of a ROS package. The following steps are required:
- Compile CAP-system rospackage.
- Download the dataset.
- Play the rosbag with the command
rosbag play /path_to_rosbags/***.bagand also executeroslaunch cap_codes localisation_1_3.launch. (You can also integrate therosbag playcommand into the launch file, depending on user preference.) - You can monitor
/cap_cdor/cap_pnpthrough PlotJuggler or by any other means.







