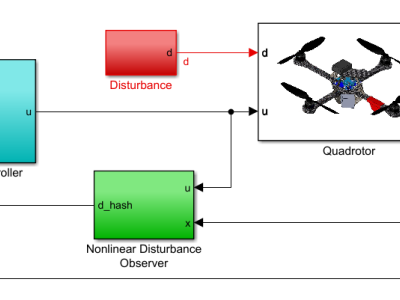
This dataset inludes a nonlinear disturbance observer (NDOB)-based controller for attitude and altitude control of a quadrotor. The NDOB is used to estimate and compensate disturbances that are imposed naturally on the quadrotor due to aerodynamics and parameter uncertainties. It is demonstrated herein that the proposed observer can estimate external disturbances asymptotically.
- Categories: