Supplementary Material: Algorithmic Framework for Analyzing and Simulating Multi-axial Robotic Transformations in Spatial Coordinates
- Citation Author(s):
-
Mbadiwe Benyeogor
 (Institute of Physics University of Munster, Munster, Germany)
Andrew O. Benyeogor (CTE - Computer Science & Robotics Lab. International Leadership of Texas Aggieland, Texas, USA)Tobore L. Igbigbi (Dept. Business Information Systems Central Michigan University Mount Pleasant, Michigan, 8859, USA)Abubakar A. Dahiru (National Information Technology Development Agency (NITDA) Abuja - FCT, Nigeria)Prosper Agumey (Industrial Liaison Directorate Accra Technical University Barnes Road, Accra, Ghana)Ekarika B. Uwak (Dept. Physics & Physics Engineering Obafemi Awolowo University Ile-Ife, Osun State, Nigeria)
(Institute of Physics University of Munster, Munster, Germany)
Andrew O. Benyeogor (CTE - Computer Science & Robotics Lab. International Leadership of Texas Aggieland, Texas, USA)Tobore L. Igbigbi (Dept. Business Information Systems Central Michigan University Mount Pleasant, Michigan, 8859, USA)Abubakar A. Dahiru (National Information Technology Development Agency (NITDA) Abuja - FCT, Nigeria)Prosper Agumey (Industrial Liaison Directorate Accra Technical University Barnes Road, Accra, Ghana)Ekarika B. Uwak (Dept. Physics & Physics Engineering Obafemi Awolowo University Ile-Ife, Osun State, Nigeria) - Submitted by:
- Mbadiwe Benyeogor
- Last updated:
- DOI:
- 10.21227/kd0c-f183
- Data Format:
- Research Article Link:
 129 views
129 views
- Categories:
- Keywords:
Abstract
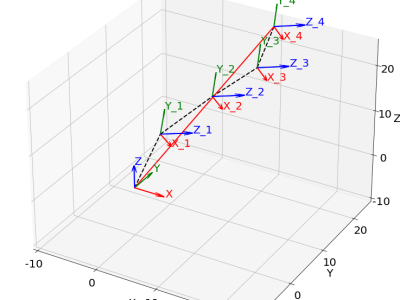
This data port serves as a valuable extension to the article titled "Algorithmic Framework for Analyzing and Simulating Multi-axial Robotic Transformations in Spatial Coordinates." It provides Python script implementations of the simulation algorithm detailed in the paper. These scripts are designed to allow seamless adoption and experimentation with the proposed algorithm, enhancing its usability for researchers and practitioners alike. Through these executable codes, this data port contributes to the reproducibility and practical application of the algorithmic framework for analyzing and simulating multi-axial robotic transformations in spatial coordinates. Moreover, these scripts find utility in various fields such as computational mechanics, topology, geometry, and computer graphics, expanding their potential applications.
Instructions:
Copy and paste the code in the document into a Jupyter Notebook and execute it after ensuring that the required packages are installed. This will generate graphics resembling those depicted in the document.




Updated version