Datasets
Standard Dataset
Stochastic Motion Planning Framework with Biomechanical Trajectory Optimization for Physically Assistive Robots
- Citation Author(s):
- Submitted by:
- Bibhu Sharma
- Last updated:
- Mon, 06/13/2022 - 17:12
- DOI:
- 10.21227/qkfd-2443
- Data Format:
- License:
 156 Views
156 Views- Categories:
- Keywords:
Abstract
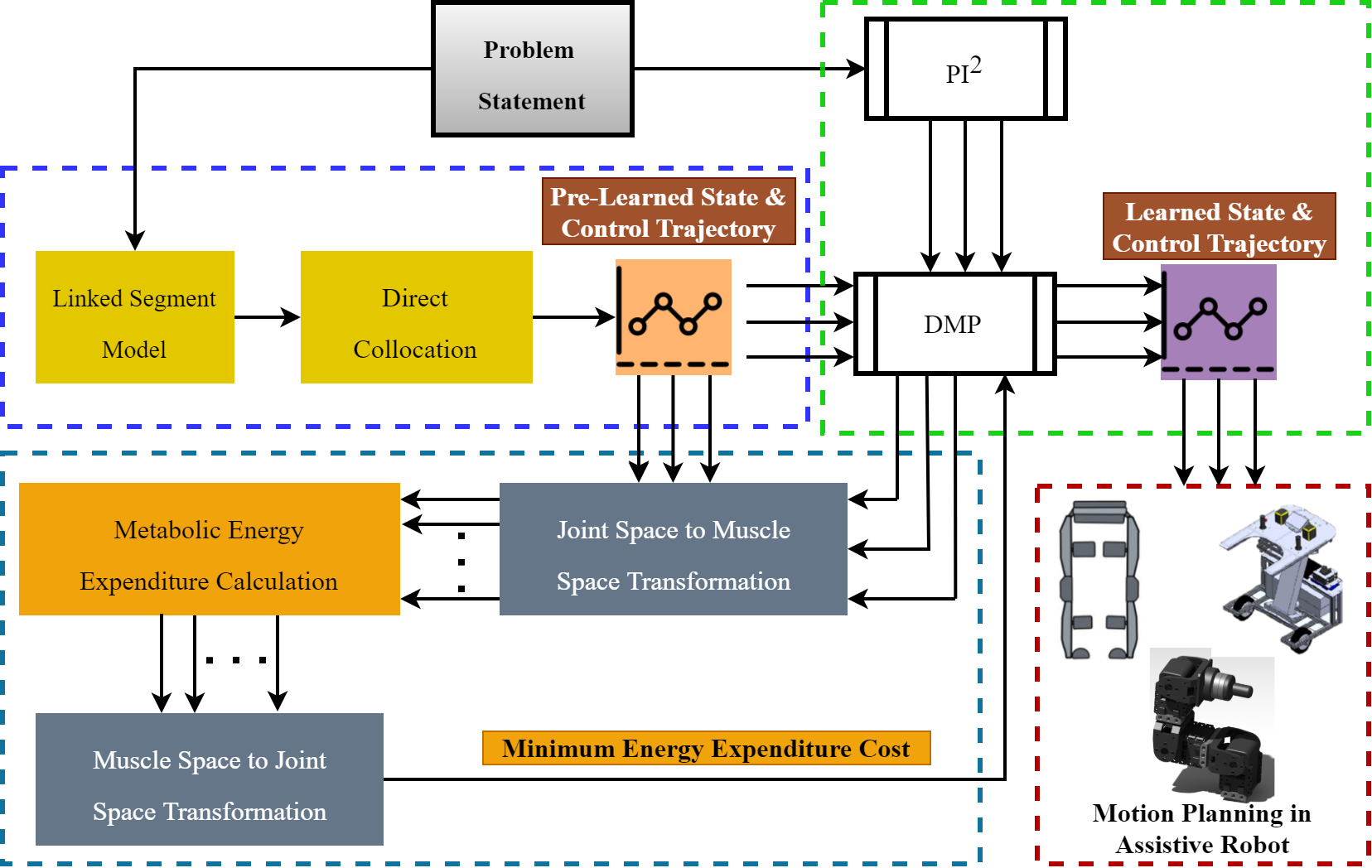
Biomechanics has predominantly relied upon the trajectory optimization method for the analysis and prediction of the movement of the limbs. Such approaches have paved the way for the motion planning of biped and quadruped robots as well. Most of these methods are deterministic, utilizing first-order iterative gradient-based algorithms incorporating the constrained differentiable objective functions. However, the limitation of prevailing methods concerning differentiability hinders the implementation of non-differentiable objective functions such as metabolic energy expenditure (MEE) function, which is highly relevant for physiological systems and can even be implemented across the muscular space. This paper consolidates the implementation of the prevalent direct collocation-based optimal control method with the stochastic trajectory optimization method based on Policy Improvement with Path Integral for comprehending the human sit-to-stand (STS) motion. This method utilizes reinforcement learning of Dynamic Movement Primitive (DMP) to learn a goal-based trajectory, which is appropriate for the implementation. This dataset includes the experimental and simulation data for the validation of the method and also for the advancement of this method into new applications.
This dataset consists of the simulation and experimental data belonging to the proposed biomechanical approach of motion planning of sit-to-stand motion. The data has been formatted with Microsoft Excel Format *.xlsx






Comments
Thank you for the work done. I hope it helps my work.
Thank you for the work done. I hope it helps my work.