First Name
Bibhu
Last Name
Sharma
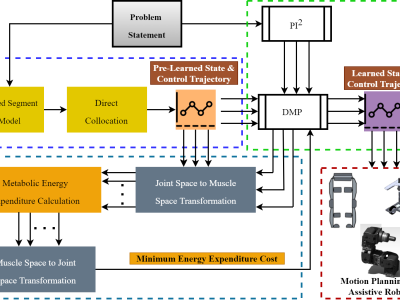
Biomechanics has predominantly relied upon the trajectory optimization method for the analysis and prediction of the movement of the limbs. Such approaches have paved the way for the motion planning of biped and quadruped robots as well. Most of these methods are deterministic, utilizing first-order iterative gradient-based algorithms incorporating the constrained differentiable objective functions.