Electromyography (EMG) data set of 4 gestures performed with the right hand.
- Citation Author(s):
-
Bolivar Núñez
 (FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Mauricio Valarezo
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Alexander Saravia
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Francis Loayza
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Edwin Valarezo
(FIEC, Escuela Superior Politécnica del Litoral, ESPOL)
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Mauricio Valarezo
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Alexander Saravia
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Francis Loayza
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Edwin Valarezo
(FIEC, Escuela Superior Politécnica del Litoral, ESPOL)
- Submitted by:
- Bolivar Nunez
- Last updated:
- DOI:
- 10.21227/ear9-rt77
- Data Format:
- Links:
 2302 views
2302 views
- Categories:
- Keywords:
Abstract
The design and implementation of an anthropomorphic robotic hand control system for the Bioengineering and Neuroimaging Laboratory LNB of the ESPOL were elaborated. The myoelectric signals were obtained using a bioelectric data acquisition board (CYTON BOARD) using six channels out of 8 available, which had an amplitude of 200 [uV] at a sampling frequency of 250 [Hz].
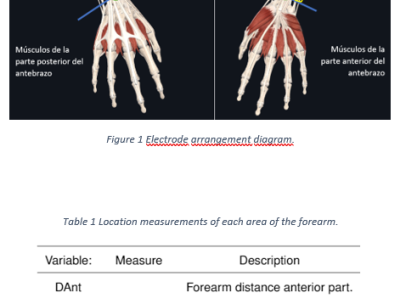
The data were obtained through an experiment that consisted of the subject mimicking four right-hand gestures with 20 repetitions per gesture (80 repetitions in total) in each session; each movement was captured at a 2-second interval. For this purpose, ten healthy subjects were recruited, of whom five were female and whose average age was 30 years. All subjects were right-handed (score 64.88) measured by the Edinburgh Handedness Inventory (EHI) dexterity test (Oldfield RC, 1971). All individuals signed the informed consent. The experiment consisted of 13 electrodes, the distribution of which can be seen in Illustration 1 and Table 1. The forearm was prepared during the procedure, and the electrodes were fixed with adhesive tape to improve skin contact.
Instructions:
The following methodology has been considered to proceed with the supervised learning classification models:
Load the data in *.csv files, considering that each file is an independent subject.
The data are separated by class, then centralized through the mean and normalized with the MIN-MAX scaler.
Digital filtering is applied to remove parasitic frequencies from the power grid, environmental noise and physiological noise sources. Notch and Butterworth band-pass filtering (10 - 100 [Hz]) was tested.
Extraction of statistical characteristics from the data.
Normalization by type of feature obtained.
Feature relevance analysis. Good classification results were obtained with the 20 best features.
Data is split into 20% for evaluation and 80% for the training of the different classification models. Randomization is applied in data selection.
Application of different classification models. Over 80% of accuracy was obtained with the "Multi-layer Perceptron classifier" model.







