LEAVE-ONE-OUT ELECTROMYOGRAPHY (EMG) DATA SET OF 4 GESTURES PERFORMED WITH THE RIGHT HAND

- Citation Author(s):
-
Bolivar Nuñez
 (FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Edwin Valarezo
(FIEC, Escuela Superior Politécnica del Litoral, ESPOL)
(FIMCP, Escuela Superior Politécnica del Litoral, ESPOL)
Edwin Valarezo
(FIEC, Escuela Superior Politécnica del Litoral, ESPOL)
- Submitted by:
- Bolivar Nunez
- Last updated:
- DOI:
- 10.21227/ndjb-x470
- Data Format:
 238 views
238 views
- Categories:
- Keywords:
Abstract
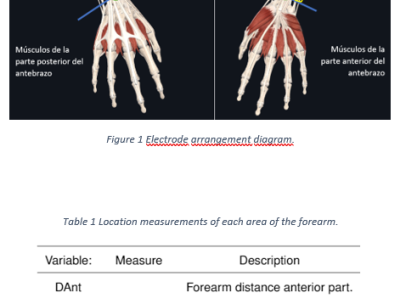
A new design and implementation of a control system for an anthropomorphic robotic hand has been developed for the Bioinformatics and Autonomous Learning Laboratory (BALL) at ESPOL. Myoelectric signals were acquired using a bioelectric data acquisition board (CYTON BOARD) with six out of the available eight channels. These signals had an amplitude of 200 [uV] and were sampled at a frequency of 250 [Hz].
The data presented here extends the experiment conducted in the (ELECTROMYOGRAPHY (EMG) DATA SET OF 4 GESTURES PERFORMED WITH THE RIGHT HAND, ###), which was utilized for training, validation, and testing of the Multi-channel Biosignal Transformer (MuCBiT). For this purpose, five healthy subjects were recruited, including four females, with an average age of 28 years. All subjects were right-handed (with an Edinburgh Handedness Inventory (EHI) dexterity test score of 77.56), as measured by the Edinburgh Handedness Inventory (EHI) dexterity test (Oldfield RC, 1971).
Instructions:
The following methodology has been considered to proceed with the transformer model MuCBiT:
- Load the data in *.csv files, considering that each file is an independent subject.
- The data are separated by class, then centralized through the mean and normalized with the MIN-MAX scaler.
- Any digital filtering is applied.
- The present data set was used for testing the model which got an accuracy of 85%.