Benchmark dataset for depth estimation from lightfield images

- Citation Author(s):
-
Mingtao FengYaonan WangJian LiuLiang ZhangHasan ZakiAjmal Mian

- Submitted by:
- Ajmal Mian
- Last updated:
- DOI:
- 10.21227/yk0j-e526
- Data Format:
- Research Article Link:
- Links:
 309 views
309 views
- Categories:
- Keywords:
Abstract
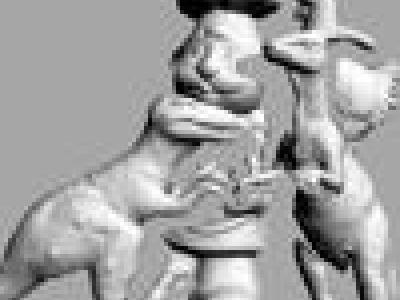
We propose a real world data set comprising light field images of 19 objects captured with the Lytro Illum camera in outdoor scenes and their corresponding 3D point clouds, as ground truth, captured with the 3dMD scanner. This data set allows more precise 3D pointcloud level comparison of algorithms for the task of depth estimation or 3D point cloud reconstruction from light field images.
Instructions:
There are 19 folders corresponding to the objects imaged with the light field camera multiple times. This data is in .mat format i.e. Matlab data files. Each folder also contains a .wrl file i.e. a point cloud (and mesh) obtained with the 3dMD scanner which uses two view points to capture 180 degrees.
A camera parameters file is also provided for the Lytro Illum camera.