Artificial Intelligence

Acquiring imagery of extraterrestrial planetary surfaces has consistently posed a significant challenge. Moreover, the availability of publicly accessible, annotated lunar datasets remains exceedingly sparse. To address this gap in the field, we have developed the Real Chang'e Lunar Landscape Dataset. The images in this dataset were captured by the landing cameras of the Chang'e-3, Chang'e-4, and Chang'e-5 lunar mission probes, as well as the panoramic and terrain cameras carried by the Yutu-1 and Yutu-2 lunar rovers used during the missions.
- Categories:
 38 Views
38 Views
Acquiring imagery of extraterrestrial planetary surfaces has consistently posed a significant challenge. Moreover, the availability of publicly accessible, annotated lunar datasets remains exceedingly sparse. To address this gap in the field, we have developed the Real Chang'e Lunar Landscape Dataset. The images in this dataset were captured by the landing cameras of the Chang'e-3, Chang'e-4, and Chang'e-5 lunar mission probes, as well as the panoramic and terrain cameras carried by the Yutu-1 and Yutu-2 lunar rovers used during the missions.
- Categories:
86 Views
This is an optical flow dataset which covers multiple independent moving object samples under various adverse weather. This is an optical flow dataset which covers multiple independent moving object samples under various adverse weather. This is an optical flow dataset which covers multiple independent moving object samples under various adverse weather.
- Categories:
359 ViewsIn order to improve the efficiency and quality of salt-and-pepper denoising and realize the strategy of ‘denoising after judging’, the noise image classification network (CNN-J) is needed to judge whether the input image is a noisy image. For noisy images, the noise marking network (CNN-M) and noise denoising network (CNN-D) are combined for denoising processing, and the clean image will be directly output. In order to train the above three networks, three datasets are provided here, which are dataset_J, dataset_M and dataset_D, respectively.
- Categories:
460 Views
In this paper, a modified zeroing neurodynamics (MZND) model with immunity to periodic noises is proposed from a control perspective to address time-varying nonlinear equations (TVNE), a common issue in engineering applications. Grounded in the Lyapunov stability theory, this paper provides a thorough assessment of the performance of the MZND model. Through comparative analyses and simulations, the superior performance of the MZND model is validated against existing neurodynamics models.
- Categories:
160 Views
eterogeneous graph representation learning is crit-
ical for analyzing complex data structures. Metapaths within this
field are vital as they elucidate high-order relationships across the
graph, significantly enhancing the model’s accuracy and depth of
understanding. However, metapaths tend to prioritize long-range
dependencies of the target node, which can lead to the oversight of
potentially crucial 1st-order heterogeneous neighbors or short-
range dependencies. To address this challenge and circumvent
- Categories:
34 Views
RLED contains 80,400 images and corresponding events, we utilized a photometer to continuously measure scene illumination and calculate the illumination value after attenuation at the event camera. The capture scenes included city (35.0%), suburbs (10.3%), town (14.5%), village (17.8%), and valley (22.4%). Half of the RLED frames are captured at a frame rate of 25 fps, and the other half at 10 fps. The exposure time is set to 1ms, 3ms, and 5ms based on the varying environmental illumination.
- Categories:
154 Views
The small rectal cancer dataset only consists of 190 MR images (including ADC, DCE, DWI and T2WI images), which can be categorized into 2 classes, i.e., T2 and T3. Fig. 2 illustrates some of the original MR images about T2 and T3 in the rectal cancer dataset. The ground-truth labels about tumor and rectum for all MR images are defined by one gastrointestinal radiologist.
- Categories:
114 Views
CARLA-AOD is a novel aerial object detection dataset created using the CARLA autonomous driving simulator. It comprises 2,160 images from 18 diverse urban and rural scenarios, featuring 4 vehicle categories, 24 viewpoints, and 5 scales. This dataset aims to support research in aerial object detection, offering comprehensive viewpoint coverage and rich environmental diversity to enhance model performance and generalization.
- Categories:
924 Views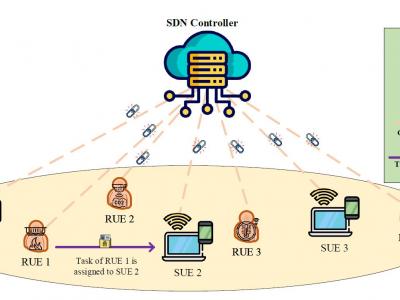
Abstract—In massive Internet of Things (IoT) deployments,
the efficient allocation of computing resources to IoT devices
while preserving devices’ data poses a significant challenge.
This paper proposes a new online probabilistic model to address
uncertainties in demand and resource allocation for IoT
networks, where the task computing of requesting devices is
addressed by serving devices. The model incorporates uncertainty
and formulates an optimization problem, concerning available
- Categories:
134 Views