Introduction
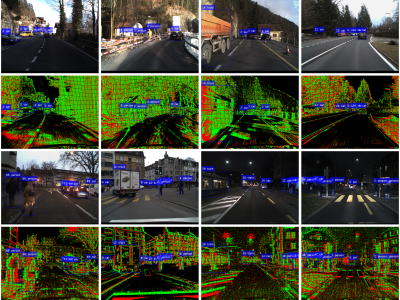
Welcome to the new challenging event-based multi-object tracking dataset (DSEC-MOT) repository. Our goal is to provide a challenging and diverse event-based MOT dataset with various real-world scenarios to facilitate the objective and comphrehensive evaluation of event-based multi-object tracking algorithms. This dataset, built upon DSEC, contains a variety of traffic entities and complex scenarios, aiming to address the current lack of event-based MOT datasets.
- Categories: