Datasets
Open Access
University of Toronto Foot-Mounted Inertial Navigation Dataset
- Citation Author(s):
-
BrandonWagstaff
 University of TorontoValentinPeretroukhinJonathanKellyUniversity of Toronto
University of TorontoValentinPeretroukhinJonathanKellyUniversity of Toronto - Submitted by:
- Brandon Wagstaff
- Last updated:
- Fri, 07/23/2021 - 16:15
- DOI:
- 10.21227/v1z6-9z84
- Data Format:
- Links:
- License:
 1794 Views
1794 Views- Categories:
Abstract
This dataset consists of measurements from a foot-mounted inertial measurement unit (IMU). In total, we provide data from five different test subjects travelling over more than 7.6 km. The data are combined with various forms of ground truth positioning information that can be used to evaluate the accuracy of a zero-velocity-aided, foot-mounted inertial navigation system (INS). In contrast to other similar datasets, our data incorporate several non-walking motions, such as running, crawling, and stair-climbing, as well as mixed-motion trials in which the test subjects alternated between walking and running. In addition to the dataset itself, we also provide an open source foot-mounted INS, with several zero-velocity detector implementations already coded up. The Python-based INS (called PyShoe), along with a suite of data processing tools, is available in the provided Github repository.
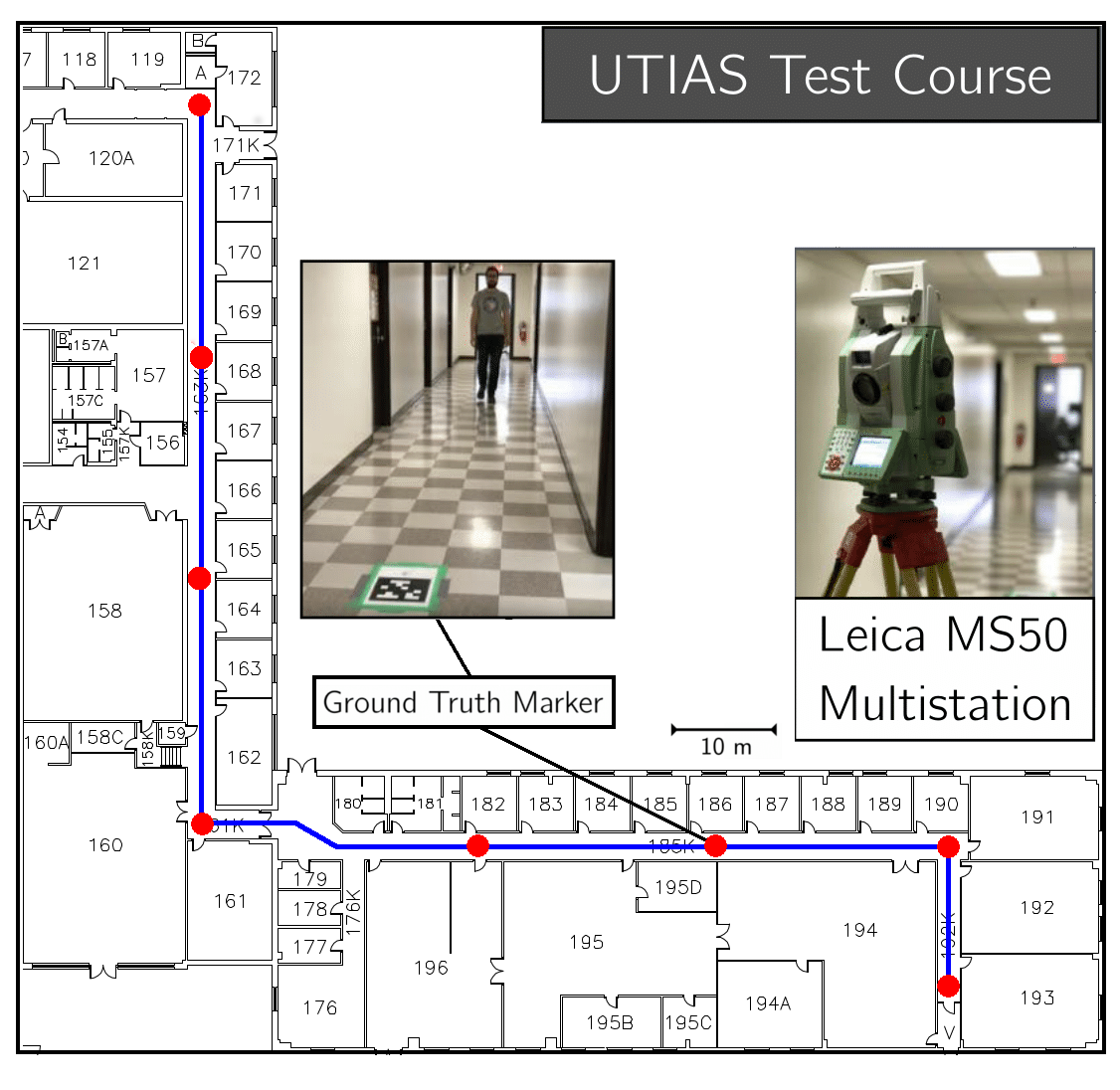
Herein, we provide inertial data (produced from an inertial measurement unit) collected in three different test environments. Each environment contains multiple trajectories, and we provide the raw, foot-mounted inertial measurements for each trajectory. Additionally, we include forms of ground truth for each trajectory (the form of ground truth varies within each test environment). For each trajectory, we include processed results that can be used for benchmarking other systems. Our processed results (six degree-of-freedom trajectory estimates) are generated from a baseline zero-velocity-aided inertial navigation system (INS).
Once the dataset has been downloaded, it should be unpacked into the PyShoe repository in order to use the available tools with the provided dataset: To do so, unzip the results and data folders into the main directory. The correct folder structure is as follows:
| - - pyshoe
| | - - data
| | - - hallway
| | - - stairs
| | - - vicon
| | - - results
Following this, we refer you to the readme instructions in the Github repository for detailed instructions on how the data can be used with our open-source INS. See the individual readme files within the various data subdirectories to understand how the dataset is formatted.
Dataset Files
- _zip-contents
 pyshoe_data.zip.json (33.21 kB)
pyshoe_data.zip.json (33.21 kB) pyshoe_data.zip (1.41 GB)
pyshoe_data.zip (1.41 GB) readme.txt (226 bytes)
readme.txt (226 bytes)






Comments
Thanks for your work.
I intent to use your dataset for working on 3d gait data collected in my rehabilitation service.