Urban Semantic 3D Dataset
- Citation Author(s):
-
Kevin Foster (JHU/APL)Gordon Christie (JHU/APL)Myron Brown (JHU/APL)
- Submitted by:
- Myron Brown
- Last updated:
- DOI:
- 10.21227/9frn-7208
- Data Format:
- Links:
 11713 views
11713 views
- Categories:
- Keywords:
Abstract
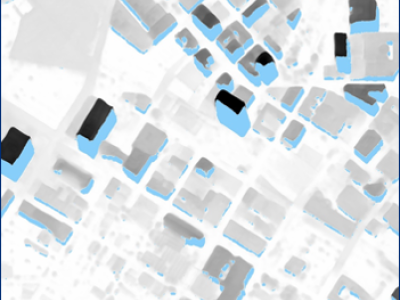
This dataset extends the Urban Semantic 3D (US3D) dataset developed and first released for the 2019 IEEE GRSS Data Fusion Contest (DFC19). We provide additional geographic tiles to supplement the DFC19 training data and also new data for each tile to enable training and validation of models to predict geocentric pose, defined as an object's height above ground and orientation with respect to gravity. We also add to the DFC19 data from Jacksonville, Florida and Omaha, Nebraska with new geographic tiles from Atlanta, Georgia.
UPDATE: New data associated with our CVPRW'21 paper and the Overhead Geopose Challenge is now also archived here. Winning solutions from the contest, including model weights, are also now archived here. For more information about the contest, see the following links:
https://www.drivendata.org/competitions/78/overhead-geopose-challenge
https://www.drivendata.co/blog/overhead-geopose-benchmark
https://www.drivendata.co/blog/overhead-geopose-challenge-winners
https://github.com/drivendataorg/overhead-geopose-challenge
https://github.com/pubgeo/monocular-geocentric-pose
Instructions:
Detailed information about the data content, organization, and file formats is provided in the README files. For image data, individual TAR files for training and validation are provided for each city. Extra training data is also provided in separate TAR files. For point cloud data, individual ZIP files are provided for each city from DFC19. These include the original DFC19 training and validation point clouds with full UTM coordinates to enable experiments requiring geolocation.
Original DFC19 dataset:
https://ieee-dataport.org/open-access/data-fusion-contest-2019-dfc2019
We added new reference data to this extended US3D dataset to enable training and validation of models to predict geocentric pose, defined as an object's height above ground and orientation with respect to gravity. For details, please see our CVPR paper.
CVPR paper on geocentric pose:
http://openaccess.thecvf.com/content_CVPR_2020/papers/Christie_Learning_Geocentric_Object_Pose_in_Oblique_Monocular_Images_CVPR_2020_paper.pdf
Source Data Attribution
All data used to produce the extended US3D dataset is publicly sourced. Data for DFC19 was derived from public satellite images released for IARPA CORED. New data for Atlanta was derived from public satellite images released for SpaceNet 4, licensed under a Creative Commons Attribution-ShareAlike 4.0 International License. All other commercial satellite images were provided courtesy of DigitalGlobe. U. S. Cities LiDAR and vector data were made publicly available by the Homeland Security Infrastructure Program.
CORE3D source data: https://spacenetchallenge.github.io/datasets/Core_3D_summary.html
SpaceNet 4 source data: https://spacenetchallenge.github.io/datasets/spacenet-OffNadir-summary.html
Test Sets
Validation data from DFC19 is extended here to include additional data for each tile. Test data is not provided for the DFC19 cities or for Atlanta. Test sets are available for the DFC19 challenge problems on CodaLab leaderboards. We plan to make test sets for all cities available for the geocentric pose problem in the near future.
Single-view semantic 3D: https://competitions.codalab.org/competitions/20208
Pairwise semantic stereo: https://competitions.codalab.org/competitions/20212
Multi-view semantic stereo: https://competitions.codalab.org/competitions/20216
3D point cloud classification: https://competitions.codalab.org/competitions/20217
References
If you use the extended US3D dataset, please cite the following papers:
G. Christie, K. Foster, S. Hagstrom, G. D. Hager, and M. Z. Brown, "Single View Geocentric Pose in the Wild," Proc. of Computer Vision and Pattern Recognition EarthVision Workshop, 2021.
G. Christie, R. Munoz, K. Foster, S. Hagstrom, G. D. Hager, and M. Z. Brown, "Learning Geocentric Object Pose in Oblique Monocular Images," Proc. of Computer Vision and Pattern Recognition, 2020.
B. Le Saux, N. Yokoya, R. Hansch, and M. Brown, "2019 IEEE GRSS Data Fusion Contest: Large-Scale Semantic 3D Reconstruction [Technical Committees]", IEEE Geoscience and Remote Sensing Magazine, 2019.
M. Bosch, K. Foster, G. Christie, S. Wang, G. D. Hager, and M. Brown, "Semantic Stereo for Incidental Satellite Images," Proc. of Winter Applications of Computer Vision, 2019.
Dataset Files
- JAX_Metadata_And_Readme.tar (Size: 140 KB)
- OMA_Metadata_And_Readme.tar (Size: 250 KB)
- ATL_Metadata_and_Readme.tar (Size: 340 KB)
- JAX_PointClouds.zip (Size: 1.58 GB)
- OMA_PointClouds.zip (Size: 2.35 GB)
- JAX_Val.tar (Size: 7.57 GB)
- OMA_Val.tar (Size: 11.04 GB)
- JAX_Train.tar (Size: 70.39 GB)
- OMA_Train.tar (Size: 105.11 GB)
- ATL_Train.tar (Size: 266.6 GB)
- JAX_Extra.tar (Size: 121.42 GB)
- OMA_Extra.tar (Size: 180.73 GB)
- geopose_test_rgbs.tar.gz (Size: 6.88 GB)
- geopose_train.tar.gz (Size: 58.3 GB)
- geopose-winning-solutions-and-model-files.zip (Size: 10.54 GB)