ExoNet: Egocentric Images of Walking Environments

- Citation Author(s):
-
Brokoslaw Laschowski
 (University of Waterloo)
William McNally (University of Waterloo)Alexander Wong (University of Waterloo)John McPhee
(University of Waterloo)
(University of Waterloo)
William McNally (University of Waterloo)Alexander Wong (University of Waterloo)John McPhee
(University of Waterloo)
- Submitted by:
- Brokoslaw Laschowski
- Last updated:
- DOI:
- 10.21227/rz46-2n31
- Links:
 6263 views
6263 views
- Categories:
- Keywords:
Abstract
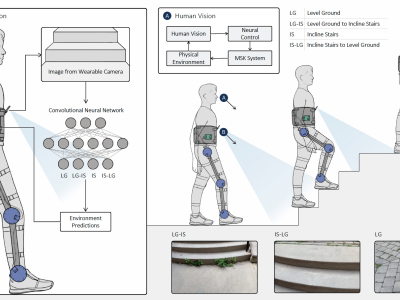
Egocentric vision is important for environment-adaptive control of humans and robots. Here we developed ExoNet, the largest open-source dataset of wearable camera images of real-world walking environments. The dataset contains over 5.6 million RGB images of indoor and outdoor environments, which were collected during summer, fall, and winter seasons. Over 923,000 images were human-annotated using a 12-class hierarchical labelling architecture. ExoNet serves as a communal platform to develop, optimize, and compare new deep learning models for egocentric visual perception, with applications in robotics and neuroscience.
Reference:
Laschowski B, McNally W, Wong A, and McPhee J. (2022). Environment classification for robotic leg prostheses and exoskeletons using deep convolutional neural networks. Frontiers in Neurorobotics. DOI: 10.3389/fnbot.2021.730965.
Instructions:
*Details on the ExoNet database are provided in the reference above. Please email Dr. Laschowski (blaschow@uwaterloo.ca) for any additional questions and/or technical assistance.