U2sonobot and demonstration of optical system

- Citation Author(s):
-
Jiang Wu
- Submitted by:
- Jiang Wu
- Last updated:
- DOI:
- 10.21227/5fya-2x64
- Data Format:
 54 views
54 views
- Categories:
- Keywords:
Abstract
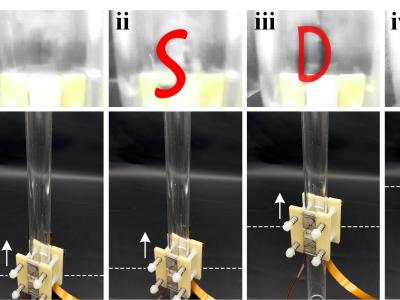
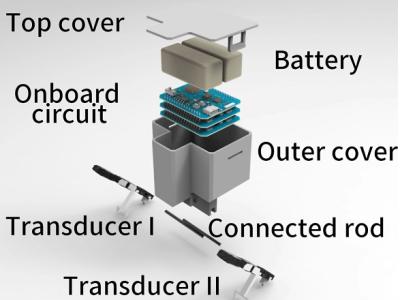
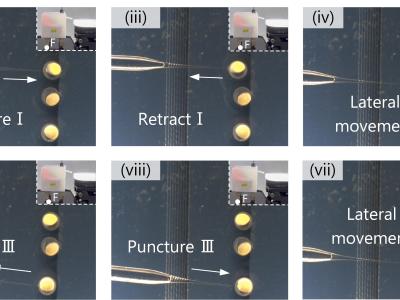
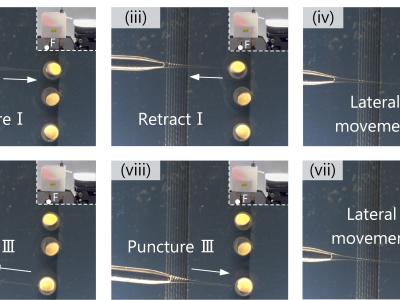
Although resonant vibration in the ultrasonic frequency range is thought as a power-intensive way for actuation, its application to untethered miniature mobile robots is still challenging because of lacking the onboard circuit that produces the ultrasonic signals with modulatable frequencies, voltages, and phases. To tackle this problem, first, the ultrasonic transducers whose longitudinal/bending vibrations share a common node was made to steadily support other components. Second, an onboard circuit was designed to convert the battery’s DC signal into multi-channels of ultrasonic signals amplified in a multi-level manner. Third, these components were compactly integrated to developed an untethered ultrasonic robot (U2sonobot) with fast, flexible, and load-carriable movements. The prototype was 54 × 52 × 46 mm3 in size and 76.5 g in weight, and its moving/carrying performance was assessed. At 59.3 kHz frequency, it yielded the maximal speed of 221 mm/s and the minimal step displacement of 0.3 μm. According to the wirelessly-received commands, it produced the flexible movements (e.g., those with adjustable speed/steering-radii and in-situ rotations) and climbed 8.9° slope. Moreover, it carried the maximal payload of 520 g and provided the minimal cost of transport of 3.9. The optical focusing/scanning system is a candidate application area for U2sonobot.
Instructions:
Although resonant vibration in the ultrasonic frequency range is thought as a power-intensive way for actuation, its application to untethered miniature mobile robots is still challenging because of lacking the onboard circuit that produces the ultrasonic signals with modulatable frequencies, voltages, and phases. To tackle this problem, first, the ultrasonic transducers whose longitudinal/bending vibrations share a common node was made to steadily support other components. Second, an onboard circuit was designed to convert the battery’s DC signal into multi-channels of ultrasonic signals amplified in a multi-level manner. Third, these components were compactly integrated to developed an untethered ultrasonic robot (U2sonobot) with fast, flexible, and load-carriable movements. The prototype was 54 × 52 × 46 mm3 in size and 76.5 g in weight, and its moving/carrying performance was assessed. At 59.3 kHz frequency, it yielded the maximal speed of 221 mm/s and the minimal step displacement of 0.3 μm. According to the wirelessly-received commands, it produced the flexible movements (e.g., those with adjustable speed/steering-radii and in-situ rotations) and climbed 8.9° slope. Moreover, it carried the maximal payload of 520 g and provided the minimal cost of transport of 3.9. The optical focusing/scanning system is a candidate application area for U2sonobot.