Datasets
Standard Dataset
Development of an untethered ultrasonic robot with fast and load-carriable movement imitating rotatory galloping gait
- Citation Author(s):
- Submitted by:
- Jiang Wu
- Last updated:
- Sun, 08/27/2023 - 05:03
- DOI:
- 10.21227/yakv-ks89
- Data Format:
- License:
 121 Views
121 Views- Categories:
- Keywords:
Abstract
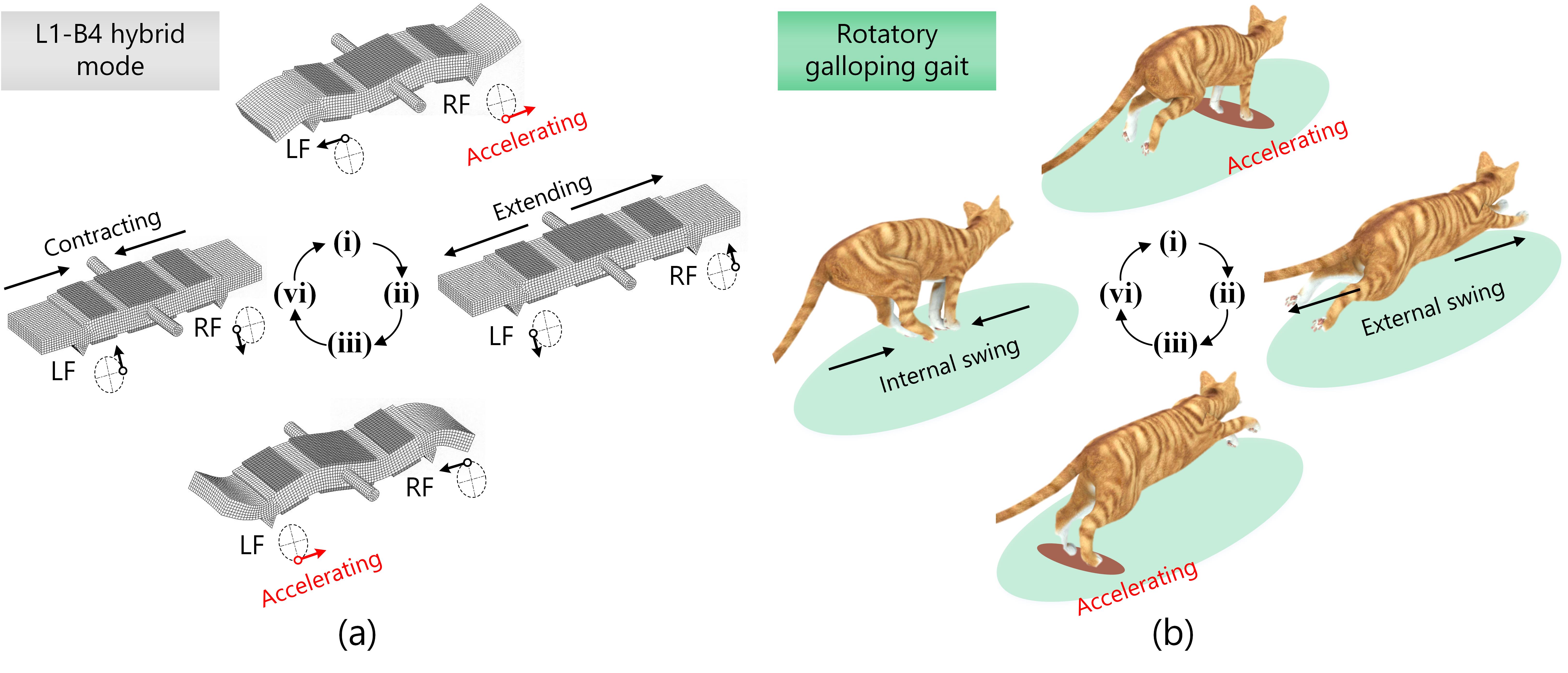
(i) At t = nTp [where n is an integer and Tp (= 1/f) is the period], the LF’s longitudinal vibration velocity and bending vibration displacement reach the peak values along the −x and +z axes, respectively. In the meantime, the RF’s longitudinal vibration velocity and bending vibration displacement are maximal in the +x and −z axes, respectively.(ii) At t = (n + 1/4)Tp, the longitudinal vibration velocities and the bending vibration displacements of the LF and RF are equal to zero. (iii) At t = (n + 1/2)Tp, the LF’s longitudinal vibration velocity and bending vibration displacement are maximal in the +x and −z axes, respectively; while the RF’s longitudinal vibration velocity and bending vibration displacement are maximal in the −x and +z axes, respectively. (vi) At t = (n + 3/4)Tp, the state is inverse to that in step (ii). When the transducer is used in the self-moving actuator, it is accelerated alternatively in the steps (i) and (iii) because the longitudinal vibration velocity exceeds the actuator’s speed, while it is decelerated in the other steps. Since the decelerating effect offsets the accelerating effect in a period, the actuator moves with almost constant speed. The operating sequences correspond to the quadruped’s rotatory galloping gait [see Fig. 4(b)]. At θ = −90°, the sequence becomes (i)→(vi)→(iii)→(ii) and the actuator moves in the opposite direction.
In this paper, we present an untethered ultrasonic robot operating in resonant vibration by integrating dual transducers, an onboard circuit, and a battery. In terms of vibration system, the transducer works in the longitudinal and bending vibrations, which lead to the out-of-phase swing motion and the alternating acceleration, respectively; these functions imitate the rotatory galloping gait of the four-foot animals from the viewpoint of the driving feet’s movement pattern and the operating sequence. With respect to electrical system, an onboard driving circuit is devised by using a few components in ‘distributed’ construction to achieve the multi-level amplification, which provides sufficient and stable voltage for actuation. The specification of the untethered ultrasonic robot can be summarized as
(1) For the main body of each transducer, the size and weight are limited to 45×20×7 mm3 and 10.22 g, respectively; and these values are 45×10×9 mm3 and 6.60 g for each driving circuit.
(2) It yielded the maximal speed of 221 mm/s and the minimal step displacement of 0.3 μm.
(3) After receiving the commands wirelessly, it provided flexible movements in various forms, e.g., moving translationally with adjustable speeds, turning with changeable steering radii, and in-situ rotating.
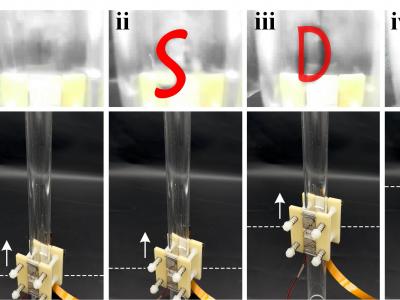
(4) It carried the maximal payload of 520 g and climbed the slope with the maximal angle of 8.9°.
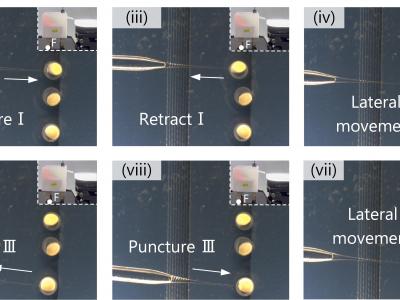
(5) The optical focusing/scanning system is a candidate application area for the ultrasonic robot.