USPA's application to cell puncture
- Citation Author(s):
-
Jiang Wu
- Submitted by:
- Jiang Wu
- Last updated:
- DOI:
- 10.21227/qkfa-tm20
- Data Format:
 43 views
43 views
- Categories:
- Keywords:
Abstract
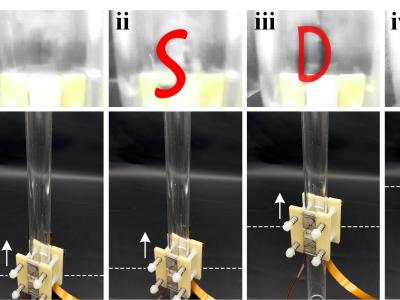
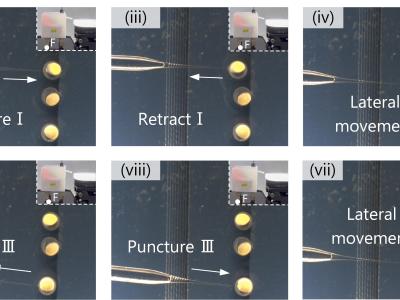
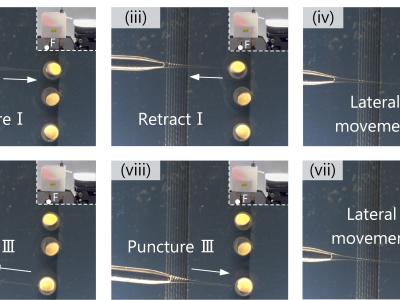
This figures show a sequence of photos of puncturing into the zerbrafish embryo. Initially, the tip approached the embryo orthogonally to the slot and punctured into the embryo at the instant that it was in contact with the cell membrane. Subsequently, the USPA caused the tip to retract from the embryo; this process changed the embryo’s position possibly because of the dragging force between the pipette and the membrane [48]. Followingly, the USPA moved in the lateral direction to the next embryo, and finally, it completed the process. These results demonstrate the USPA’s potential to cell puncture, benefiting from the untethered two-DOF movements.
Instructions:
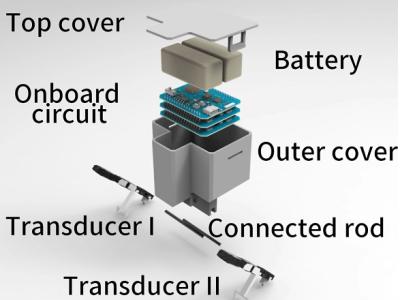
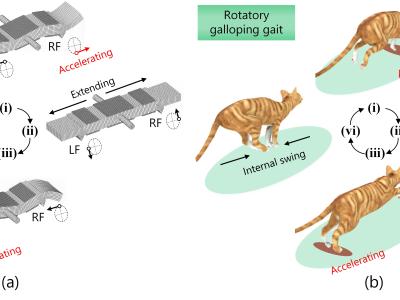
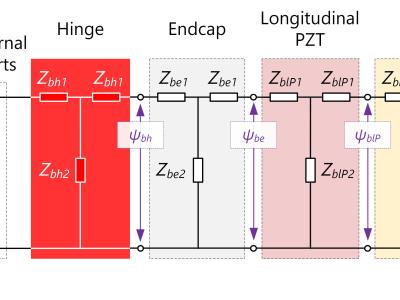
This article presents an untethered stick-slip piezoelectric actuator (USPA) with decimeter stroke and nanometer resolution. Here, four bar-shaped piezo-legs are bonded onto an alumina plate to form a simple configuration, and the actuator’s two-DOF movement is driven with an onboard circuit that converts the battery’s DC signal into multi-channels of sawtooth voltages. Interestingly, the stick-slip movements somewhat imitate the Siberian roe deer’s special gait in terms of the switching function between the stable- and unstable-contact states. First, by using the lumped-parameter model with triple mechanical branches, the piezo-leg’s resonant frequencies of the 1st, 2nd, and 3rd bending modes were structurally modulated to generate the stick-slip movement. Then, a prototype with the size of 80 × 60 × 80 mm3 was fabricated to assess its vibrating, moving, and carrying performance. At 2065 Hz frequency, the USPA yielded the maximal speed and the maximal payload of 1257.9 μm/s and 630 g, respectively. Installed with a lithium battery with 3.7 V voltage and 200 mAh capacity, the maximal running distance reached 6.92 dm, while the minimal step displacement was 12.2 nm. As a practical tool, the USPA is potentially applicable to the robotic-assistant precise operation, e.g., cell puncture and detection of wafer deficiency.