Small-scaled Pothole Point Clouds
- Citation Author(s):
-
Tingrui Zhang

- Submitted by:
- Zhang Tingrui
- Last updated:
- DOI:
- 10.21227/qy0s-br47
- Data Format:
 102 views
102 views
- Categories:
- Keywords:
Abstract
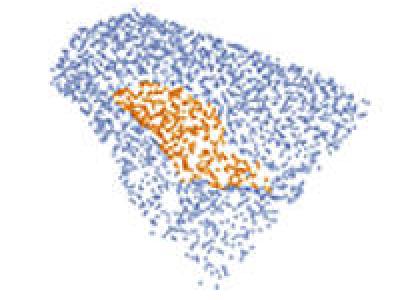
A pothole dataset collected by iPhone 14 pro. Due to the lack of publicly available small-scale pothole point cloud datasets, a custom dataset was created for model performance evaluation. The data collection area is located within the Yujiaotou campus of Wuhan University of Technology and the surrounding road network in Wuhan, China. For data acquisition, an iPhone 14 Pro equipped with a LiDAR scanner was used. The LiDAR scanner operates with near-infrared light at a wavelength of approximately 850 nanometers, featuring a 70° field of view and a maximum operational range of up to 5 meters, with ranging accuracy within ±1% to ±2%. These specifications align with the requirements for road surface pothole analysis . Each pothole was scanned by continuous circular scanning for approximately 10 seconds, leveraging the LiDAR mode of the Polycam software. The dataset comprises 591 potholes, with each pothole point cloud downsampled to 5,000 points to ensure efficient processing. To enhance the generalization capability of the proposed method, only the 3D coordinate information of the point cloud data is retained.
Instructions:
See the README.md.








research work on point cloud sample data