SceneGraph-Risk-Assessment dataset
- Citation Author(s):
-
Brandon Hsu
 (University of California, Irvine)
Shih-Yuan Yu
(University of California, Irvine)
Arnav Malawade
(University of California, Irvine)
Deepan Muthirayan
(University of California, Irvine)
Pramod Prabhakar Khargonekar
(University of California, Irvine)
Mohammad Abdullah Al Faruque
(University of California, Irvine)
(University of California, Irvine)
Shih-Yuan Yu
(University of California, Irvine)
Arnav Malawade
(University of California, Irvine)
Deepan Muthirayan
(University of California, Irvine)
Pramod Prabhakar Khargonekar
(University of California, Irvine)
Mohammad Abdullah Al Faruque
(University of California, Irvine)
- Submitted by:
- Shih-Yuan Yu
- Last updated:
- DOI:
- 10.21227/c0z9-1p30
- Data Format:
- Research Article Link:
 3226 views
3226 views
- Categories:
- Keywords:
Abstract
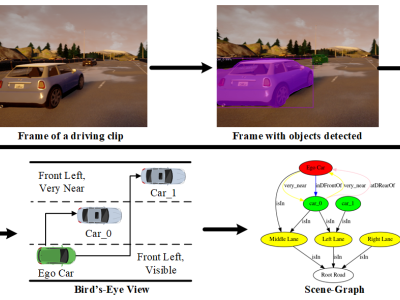
This dataset is released with our research paper titled “Scene-graph Augmented Data-driven Risk Assessment of Autonomous Vehicle Decisions” (https://arxiv.org/abs/2009.06435). In this paper, we propose a novel data-driven approach that uses scene-graphs as intermediate representations for modeling the subjective risk of driving maneuvers. Our approach includes a Multi-Relation Graph Convolution Network, a Long-Short Term Memory Network, and attention layers. To train our model, we formulate the problem of subjective risk assessment as a supervised scene classification problem. We evaluate our model on both synthetic lane-changing datasets and real-driving datasets with various driving maneuvers. We show that our approach achieves a higher classification accuracy than the state-of-the-art approach on both large (96.4% vs. 91.2%) and small (91.8% vs. 71.2%) lane-changing synthesized datasets, illustrating that our approach can learn effectively even from small datasets. We also show that our model trained on a lane-changing synthesized dataset achieves an average accuracy of 87.8\% when tested on a real-driving lane-changing dataset. In comparison, the state-of-the-art model trained on the same synthesized dataset only achieved 70.3% accuracy when tested on the real-driving dataset, showing that our approach can transfer knowledge more effectively. Moreover, we demonstrate that the addition of spatial and temporal attention layers improves our model’s performance and explainability. Finally, our results illustrate that our model can assess the risk of various driving maneuvers more accurately than the state-of-the-art model (86.5% vs. 58.4%, respectively).
In this dataset, we release both synthetic and real-driving scene-graph risk assessment datasets (e.g. syn-271-sg, syn-1043-sg, honda-571-sg, honda-1361-sg) and synthetic video clip datasets (syn-271-image, syn-1043-image) for helping our users reproduce the results presented in our paper. We also hope that this dataset can be potentially useful in their research. Please kindly consider citing us if you find this dataset useful in your research.
@article{yu2020scene, title={Scene-graph augmented data-driven risk assessment of autonomous vehicle decisions}, author={Yu, Shih-Yuan and Malawade, Arnav V and Muthirayan, Deepan and Khargonekar, Pramod P and
Al Faruque, Mohammad A}, journal={arXiv preprint arXiv:2009.06435}, year={2020}}
Instructions:
After downloading the dataset please unzip them first. Then, please refer to this repo (https://github.com/louisccc/sg-risk-assessment) for the accompanying software and for further instructions.







In reply to It's a great Scenario Diagram by Yuxiang Zhang