Datasets
Standard Dataset
Planar3D-CamEval – Comparative 3D Camera Performance Evaluation on a Flat Wall
- Citation Author(s):
-
BastianStahl
 Hochschule Bonn-Rhein-Sieg University of Applied SciencesAlexandraMielkeHochschule Bonn-Rhein-Sieg University of Applied SciencesRobertLangeHochschule Bonn-Rhein-Sieg University of Applied Sciences
Hochschule Bonn-Rhein-Sieg University of Applied SciencesAlexandraMielkeHochschule Bonn-Rhein-Sieg University of Applied SciencesRobertLangeHochschule Bonn-Rhein-Sieg University of Applied Sciences - Submitted by:
- Bastian Stahl
- Last updated:
- Fri, 02/28/2025 - 08:23
- DOI:
- 10.21227/1h5f-g273
- Data Format:
- License:
 146 Views
146 Views- Categories:
- Keywords:
Abstract
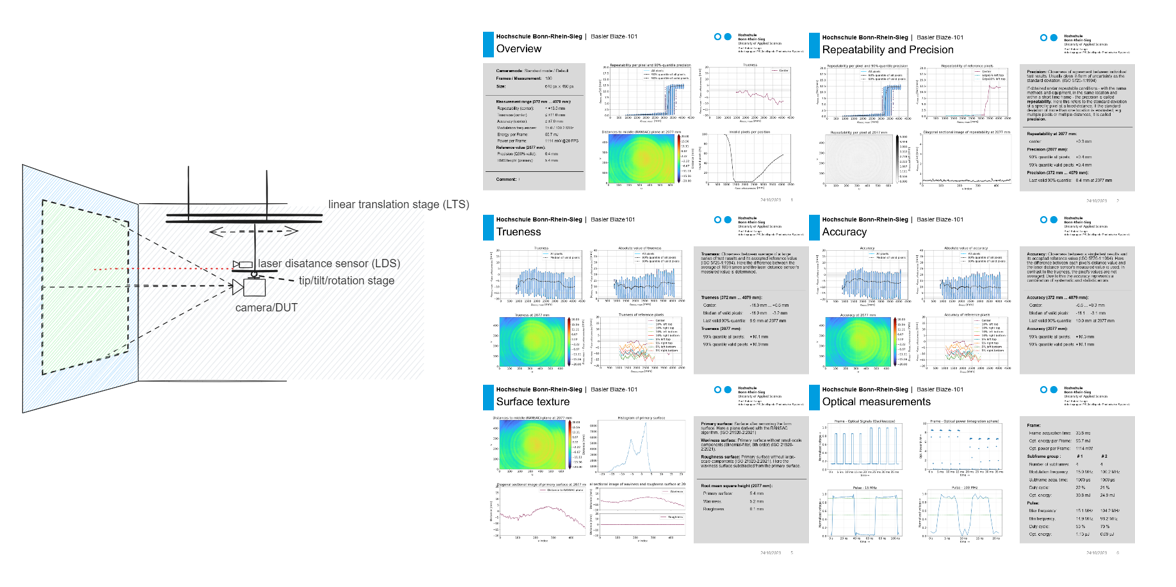
This dataset accompanies the study “Universal Metrics to Characterize the Performance of Imaging 3D Measurement Systems with a Focus on Static Indoor Scenes” and provides all measurement data, processing scripts, and evaluation code necessary to reproduce the results. It includes raw and processed point cloud data from six state-of-the-art 3D measurement systems, captured under standardized conditions. Additionally, the dataset contains high-speed sensor measurements of the cameras’ active illumination, offering insights into their optical emission characteristics. The key performance metrics—covering precision, accuracy, trueness, surface texture, and the Energy-Density-Weighted Depth Precision Index (EPI)—are summarized in a PowerPoint presentation with plots for easy comparison. By making this dataset publicly available, we aim to support further research, benchmarking, and the development of standardized evaluation methodologies for 3D imaging systems.
# Abstract
This dataset accompanies the study “Universal Metrics to Characterize the Performance of Imaging 3D Measurement Systems with a Focus on Static Indoor Scenes” and provides all measurement data, processing scripts, and evaluation code necessary to reproduce the results. It includes raw and processed point cloud data from six state-of-the-art 3D measurement systems, captured under standardized conditions. Additionally, the dataset contains high-speed sensor measurements of the cameras’ active illumination, offering insights into their optical emission characteristics. The key performance metrics—covering precision, accuracy, trueness, surface texture quality, and the Energy-Density-Weighted Depth Precision Index (EPI)—are summarized in a PowerPoint presentation with plots for easy comparison. By making this dataset publicly available, we aim to support further research, benchmarking, and the development of standardized evaluation methodologies for 3D imaging systems.
# Structure
The dataset consists of three main directories:
- /Camera_Data
- /SourceCode_Characterization_3DImagingSystems
## /Camera_Data
Contains seven folders, each storing the dataset for a specific camera. The structure is as follows:
### /Camera_Data/<camera_name>/.hydra
This folder is generated by the automated measurement setup and contains configuration settings. The code will look in `config.yaml` for camera-specific parameters. Some cameras do not have this folder; instead, they have a `settings.txt` file.
### /Camera_Data/<camera_name>/Avg
This folder contains the averaged data for each position as a single `.pcd` file, which can be generated from the data in `/ToF_PCD` using the provided code.
### /Camera_Data/<camera_name>/metrics
Includes the results of the camera characterization.
### /Camera_Data/<camera_name>/ToF_PCD
Contains the raw data to be processed. Each position has a separate folder containing its raw data.
### /Camera_Data/<camera_name>/OptMeasurements
Includes the corresponding optical power measurements. This directory contains one `.csv` file with trace data from a high-speed oscilloscope and a `.txt` file with measurements from a calibrated optical power meter. Processed results are stored in the `/Results` folder.
### /Camera_Data/<camera_name>/LDS.csv
This file contains the reference distance measurements for each position. The first column represents the position number or identifier, while the second column contains the reference distance.
### /Camera_Data/<camera_name>/settings.txt
This file contains camera-specific settings. Each camera folder includes either this file or `.hydra/config.yaml`. If both are present, `.hydra/config.yaml` will take priority.
## /SourceCode_Characterization_3DImagingSystems
Source code for generating the characterization, written in Python. Additional Sphinx-style documentation is available in `/doc`.
# Additional Material
The results of the characterization are also published here: https://doi.org/10.18418/opus-8898
Dataset Files
- Camera_Data_Basler_Blaze_101.zip (1.11 GB)
- Camera_Data_Intel_RealSenseD455.zip (802.04 MB)
- Camera_Data_Melexis_MLX75027.zip (1.18 GB)
- Camera_Data_Microsoft_AzureKinect.zip (624.85 MB)
- Camera_Data_Microsoft_KinectV1.zip (520.81 MB)
- Camera_Data_pmd_flexx2.zip (782.72 MB)
- Camera_Data_Schmersal_AMT100.zip (871.02 MB)
- SourceCode_Characterization_3DImagingSystems.zip (13.58 MB)
Documentation
| Attachment | Size |
|---|---|
| 3 KB |





