Drone Sensor Fusion Dataset
- Citation Author(s):
-
Shadi Sadeghpour (The Citadel)
- Submitted by:
- shadi sadeghpour
- Last updated:
- DOI:
- 10.21227/fdfq-s458
- Data Format:
 613 views
613 views
- Categories:
- Keywords:
Abstract
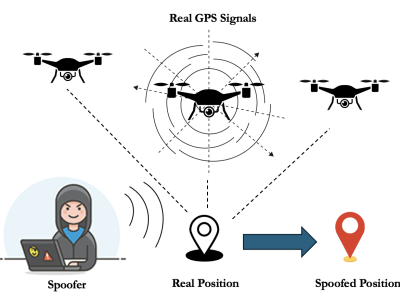
The Drone Sensor Fusion Dataset features high-quality telemetry data from real and attack-modeled UAV flights, leveraging the PX4 flight log dataset. This includes normal flight data prepared for machine learning model training and simulated attack data generated using the 'Coordinated Sensor Manipulation Attack' (CSMA) model. CSMA simulates advanced threats by subtly altering GPS and IMU data to induce undetectable navigation drift. This dataset is essential for developing and validating detection algorithms, making it a valuable resource for both research and practical applications in UAV security.
Instructions:
The Drone Sensor Fusion Dataset is provided in CSV format and includes GPS data (latitude, longitude, altitude), IMU readings (gyroscope, accelerometer), and magnetometer measurements essential for navigation and stabilization studies. Additionally, the dataset has comprehensive vehicle state and attitude data such as position, velocity, orientation (roll, pitch, yaw), and quaternion values for detailed UAV dynamics modeling. Actuator data details control signals to motors and other components, vital for analyzing control responses and potential vulnerabilities. System health metrics like CPU load, battery status, and sensor health are also included to aid in resource management and system robustness assessments.