The dataset for the Electrospinography (ESG) for non-invasively recording spinal sensorimotor networks in humans project
- Citation Author(s):
-
Alexander SteeleAmir FarajiJose L. Contreras-Vidal
- Submitted by:
- Shahin Alipour
- Last updated:
- DOI:
- 10.21227/h3te-tq15
 837 views
837 views
- Categories:
- Keywords:
Abstract
Objective. Currently, few non-invasive measures exist for directly measuring spinal sensorimotor networks. Electrospinography (ESG) is one non-invasive method but is primarily used to measure evoked responses or for monitoring the spinal cord during surgery. Our objectives for collecting this dataset were to evaluate the feasibility of ESG to measure spinal sensorimotor networks by determining spatiotemporal and functional connectivity changes during single-joint movements at the spinal and cortical levels.
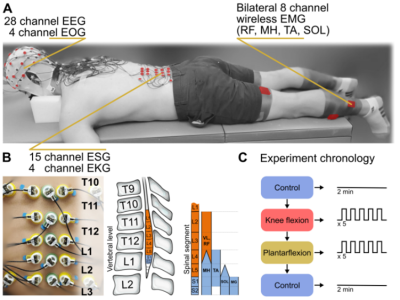
Approach. We synchronously recorded electroencephalography (EEG), electrooculography (EOG), ESG, electromyography (EMG), and lower-limb kinematics using inertial movement units (IMUs) in ten neurologically intact adults while performing one of three lower-limb tasks (no movement, plantar-flexion and knee flexion) in the prone position.
Results. We share the multimodal dataset. Findings are reported in the manuscript referenced below.
Significance. To our knowledge this is the first dataset using high density ESG, EEG, EOG, EMG and IMUs for characterizing lower limb movements. The dataset could be used for investigating ESG decoding of efferent and afferent signaling in neurologically intact adults and other applications.
Instructions:
The data repository for the “Electrospinography (ESG) for non-invasively recording spinal sensorimotor networks in humans” project.
Non-Invasive Brain-Machine Interface Systems Lab, IUCRC BRAIN (https://nsfbrain.org/), University of Houston.
Paper Citation:
Alexander Steele, Amir Faraji and Jose L. Contreras-Vidal, November 27, 2023, "The dataset for the Electrospinography (ESG) for non-invasively recording spinal sensorimotor networks in humans project", Journal of Neuroengineering, doi:
IEEE Dataport, doi: https://dx.doi.org/10.21227/h3te-tq15.
Overview:
The project proposes a novel non-invasive method for directly measuring spinal sensorimotor networks.
Focus is on evaluating the feasibility of Electrospinography (ESG) for assessing spinal sensorimotor networks during single-joint movements.
Synchronous recording of electroencephalography (EEG), electromyography (EMG), inertial measurement unit (IMU), and ESG during lower-limb tasks in neurologically intact subjects (NIS). Refer to Figure 1 in the attached document.
Data Structure:
Fifteen channels of ESG were positioned between the intervertebral spaces of the spine, starting from Thoracic (T10/T11) through Lumbar (L2/L3) that was determined via palpation (Refer to the dataset image). At each intervertebral level, three sensors were deployed, with the central sensor situated along the midline of the spinal column and the left and right sensors positioned immediately adjacent to the midline sensor. Additionally, four extra sensors were bilaterally placed approximately 5 cm from the midline, both above and below the array. Participants were instructed to engage in these three experiments performed in the prone position:
1) Maintaining a stationary position (Control): Control data were collected at both the beginning and conclusion of the experiment. The first row of data was obtained before the start, while the second row was collected immediately after completion,
2) Performing left (LPF) and right (RPF) plantarflexion, and
3) performing left (LKF) and right (RKF) knee flexion.
The folder contains subject data (NIS001-NIS010) and an additional channel location of the EEG data file for the EEGLab ( a toolbox for EEG processing in MATLAB, https://sccn.ucsd.edu/eeglab/index.php) and the license.
The dataset follows the structure outlined below, using subject NIS005 as an example:
NIS005
├── Subject Code
├── EEG
├── ESG
├── ESG Noise
├── EMG
├── EOG
├── Kinematics
└── srate
Subject Code:
In this data structure, 10 healthy subjects (NIS) perform specific movements, including right and left plantarflexion (RPF, LPF), and right and left knee flexion (RKF, LKF). Each participant is assigned a code from 1 to 10 (e.g., NIS005).
EEG:
EEG
├── Rest
├── LPF [28 x T (time)]
├── RPF [28 x T]
├── LKF [28 x T]
└── RKF [28 x T]
32 channels of EEG were positioned according to a modified 10-20 international standard arrangement. Channels TP9, PO9, PO10, and TP10 were excluded from the cap and repurposed for electrooculography (EOG) to record eye blinks and movements. The channel names and locations are provided in the attached document Figure 4.
EOG:
EOG
├── Rest
├── LPF [4 x T (time)]
├── RPF [4 x T]
├── LKF [4 x T]
└── RKF [4 x T]
Four EOG channels were set up using Channels TP9, PO9, PO10, and TP10, which were taken off the cap and used for electrooculography (EOG) to track eye blinks and movements. For the EOG setup, TP9 and TP10 were placed on the left and right temples on the sides of the face, respectively. PO9 and PO10 were positioned above and below the right eye, respectively.
ESG:
Lumbar
├── Rest
├── LPF [15 x T]
├── RPF [15 x T]
├── LKF [15 x T]
└── RKF [15 x T]
Fifteen electrodes are positioned on the thoracic and lumbar sections of the spine for specified movements (RPF, LPF, RKF, and LKF). Refer to Figure 2 in the attached doument.
The Lumbar section is a matrix of 15 by T for movement tasks performed in five blocks of five repetitions, totaling 25 repetitions per movement (e.g., 15x16000 for RPF).
ESG Noise:
LumbNoise
├── Rest
├── LPF [4 x T]
├── RPF [4 x T]
├── LKF [4 x T]
└── RKF [4 x T]
Four sensors as the reference for noise represented in a matrix of the size 4 by T (time) (e.g., 4x16000 for RPF). Refer to Figure 2 in the attached documnet.
EMG:
EMG
├── Rest
├── LPF [32 x T]
├── RPF [32 x T]
├── LKF [32 x T]
├── RKF [32 x T]
└── Names [8 x 2]
EMG sensor placement includes the left and right rectus femoris (RF), the semitendinosus portion of the medial hamstrings (MH), the tibialis anterior (TA), the gastrocnemius (MG), and the lateral aspect of soleus (SOL) muscles.
Kinematics:
Kinematics
├── Rest
├── LPF [48 x T]
├── RPF [48 x T]
├── LKF [48 x T]
├── RKF [48 x T]
└── Names [8 x 2]
The kinematics data includes readings from accelerometers and gyroscopes, each providing data on three axes: x, y, and z. This results in a total of 24 data points for cases with only gyroscope data, and 48 data points when both gyroscope and accelerometer data are available. Note: For participants 1, 9, and 10, both gyroscope and accelerometer data are available, while for the others, only gyroscope data is present. The IMU sensor and its axes are shown in Figure 3 of the attached document.
Regarding sensor placement, the muscle groups include the left and right rectus femoris (RF), the semitendinosus portion of the medial hamstrings (MH), the tibialis anterior (TA), the gastrocnemius (MG), and the lateral aspect of soleus (SOL) muscles.
Srate:
The sample rate for the dataset; the dataset has been resampled to the rate of 1000 Hz across all EEG, ESG, IMU, and EMG signals.
Funding Agency:
This work was supported by The Institute for Rehabilitation and Research (TIRR) Mission Connect grant (Award #021-112). The funders were not involved in the design of the study, the collection, analysis, and interpretation of the experimental data, the writing of this article, or the decision to submit this article for publication.