Dataset of 4D mmWave radar point clouds in the open pit mine
- Citation Author(s):
-
Tianmu Gui

- Submitted by:
- Tianmu Gui
- Last updated:
- DOI:
- 10.21227/g7ga-4z96
 448 views
448 views
- Categories:
- Keywords:
Abstract
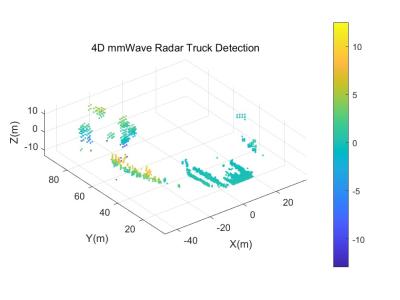
We present a comprehensive multi-sensor dataset comprising 4D mmWave radar point clouds, lidar point clouds, and camera images in the open-pit mine. The dataset encompasses various operational scenarios, including the dumping site, loading site, connecting roads, and haulage maintenance area, under various lighting conditions such as cloudy, dark, daylight, and overcast skies.
Instructions:
Our acquisition system leverages ROS, with all sensor data comprehensively recorded in Ros bag format. Each Ros bag contains two topics: /iv_points for lidar messages and /point_cloud_01 for 4D mmWave Radar messages, both categorized under PointCloud2. For the 4D mmWave radar point cloud, the fixed frame in global options and reference frame in grid settings are designated as radar_01, with the plane set to XY. For lidar, the fixed frame in global options is set to innovusion, with the plane as YZ








d