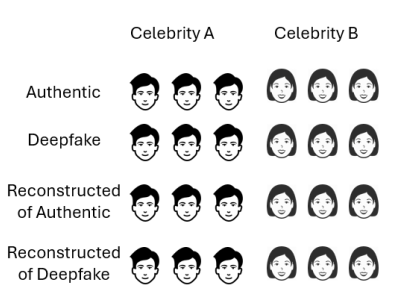
The Deepfake face detection task involves a facial image of unknown authenticity for testing. While most deepfake detection methods take only the image as input, our literature demonstrates that conditioning the deepfake detector on identity—i.e., knowing whose deepfake face the picture might be—can enhance detection performance. Existing deepfake detection datasets, such as FaceForensics++ and DFDC, do not include identity information for authentic and deepfake faces.
- Categories: