Datasets & Competitions
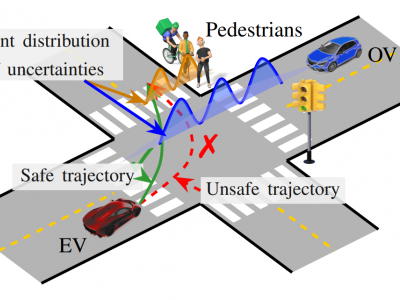
This paper develops a correct-by-design controller for an autonomous vehicle interacting with opponent vehicles with unknown intentions. We define an intention-aware control problem incorporating epistemic uncertainties of the opponent vehicles and model their intentions as discrete-valued random variables. Then, we focus on a control objective specified as belief-space temporal logic specifications. From this stochastic control problem, we derive a sound deterministic control problem using stochastic expansion and solve it using shrinking-horizon model predictive control.
- Categories:
 366 Views
366 Views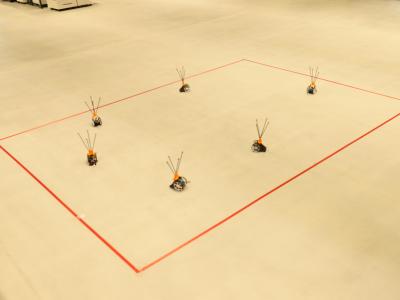
This code is with the submitted manuscript "Decentralized Optimal Coverage Control of Constant-Speed Unicycle Multi-Agent Systems Subject to State- and Input-Dependent Constraints". The code consists of MATLAB scripts and should be run in MATLAB. No version limitation and no additional toolboxes are required.
- Categories:
214 Views