*.py *.zip
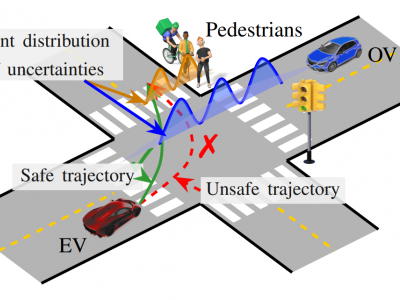
This paper develops a correct-by-design controller for an autonomous vehicle interacting with opponent vehicles with unknown intentions. We define an intention-aware control problem incorporating epistemic uncertainties of the opponent vehicles and model their intentions as discrete-valued random variables. Then, we focus on a control objective specified as belief-space temporal logic specifications. From this stochastic control problem, we derive a sound deterministic control problem using stochastic expansion and solve it using shrinking-horizon model predictive control.
- Categories:
 361 Views
361 Views
SLCeleb
Here we collected data through social media such as Youtube, because the best method to obtain data from a variety of wild and diverse acoustic environments is to use a freely available source. Otherwise, manually creating such volatility would take a long time. Even after that, we will not be able to share the data collected with other researchers.
- Categories:
468 Views