Datasets
Standard Dataset
A pole-climbing piezoelectric robot
- Citation Author(s):
- Submitted by:
- Jiang Wu
- Last updated:
- Tue, 09/10/2024 - 09:09
- DOI:
- 10.21227/td6r-vb39
- Data Format:
- License:
 477 Views
477 Views- Categories:
- Keywords:
Abstract
Normal 0 0 2 false false false EN-US JA X-NONE /* Style Definitions */ table.MsoNormalTable {mso-style-name:標準の表; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-parent:""; mso-padding-alt:0mm 5.4pt 0mm 5.4pt; mso-para-margin:0mm; mso-pagination:widow-orphan; font-size:10.5pt; mso-bidi-font-size:11.0pt; font-family:"游明朝",serif; mso-ascii-font-family:游明朝; mso-ascii-theme-font:minor-latin; mso-fareast-font-family:游明朝; mso-fareast-theme-font:minor-fareast; mso-hansi-font-family:游明朝; mso-hansi-theme-font:minor-latin; mso-font-kerning:1.0pt;}
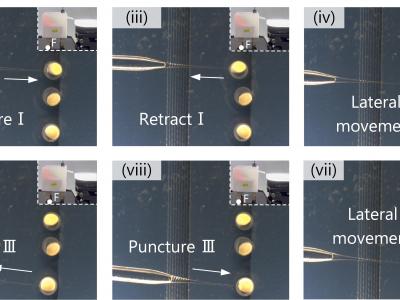
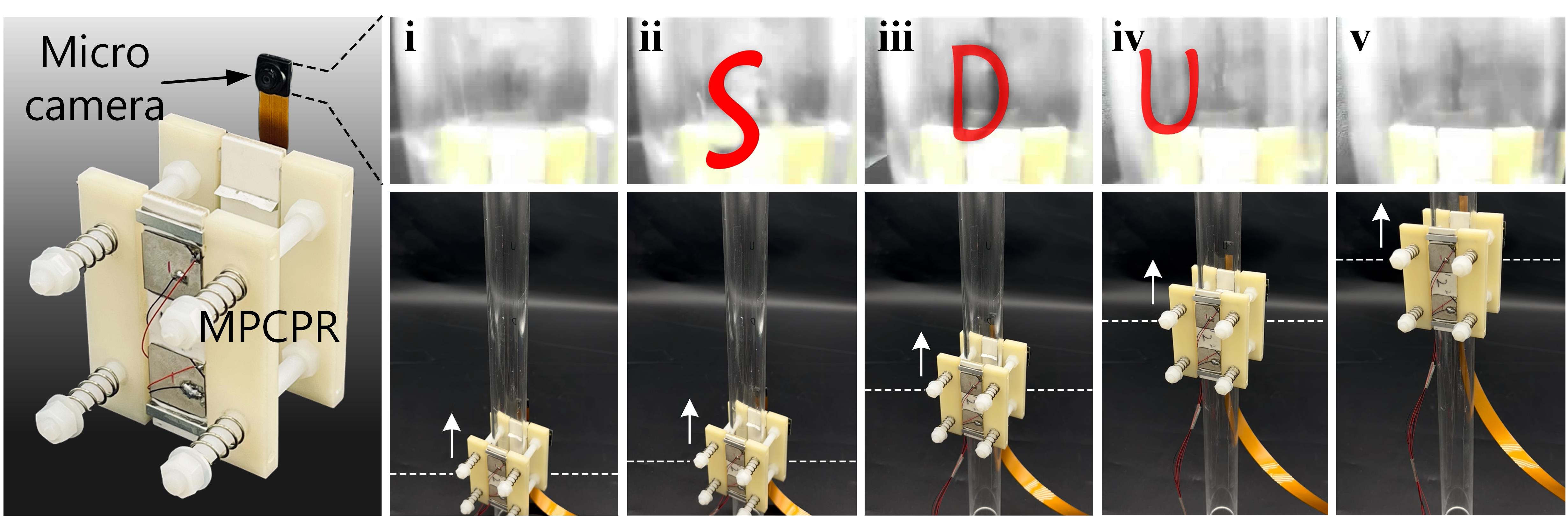
This article presents a miniature pole-climbing piezoelectric robot (MPCPR) with fast and load-towable movement. Basically, it incorporates a pair of alumina transducers, where the 3rd bending (B3) and 2nd bending (B2) vibrations are excited independently in the time domain to enable the MPCPR to climb up and down the external tubes; this interestingly imitates the squirrel’s galloping gait when it climbs trees. First, the transducer was structurally optimized by constructing a Krimhertz-transmission-theory-based model to enhance the driving-force-to-weight ratio. Then, a prototype 60 × 60 × 60 mm3 in size and 40.2 g in weight was fabricated and its climbing/towing/positioning performance was assessed. At 37.22 kHz working frequency and 30 V voltage, the MPCPR produced the maximal climbing-up speed of 183.2 mm/s and the maximal towing weight of 225 g (equal to 5.6 times its self-weight). It could climb up the tubes in circular/rectangular shapes, whose diameters/lengths are in the range of 12–28 mm. In stepping operation, it yielded the minimal step displacement of 0.32 μm. This article validates the MPCPR’s high climbing/towing capability and offers an approach to design powerful piezoelectric robots with the function of vertically climbing up external tubes.
Normal 0 0 2 false false false EN-US JA X-NONE /* Style Definitions */ table.MsoNormalTable {mso-style-name:標準の表; mso-tstyle-rowband-size:0; mso-tstyle-colband-size:0; mso-style-noshow:yes; mso-style-priority:99; mso-style-parent:""; mso-padding-alt:0mm 5.4pt 0mm 5.4pt; mso-para-margin:0mm; mso-pagination:widow-orphan; font-size:10.5pt; mso-bidi-font-size:11.0pt; font-family:"游明朝",serif; mso-ascii-font-family:游明朝; mso-ascii-theme-font:minor-latin; mso-fareast-font-family:游明朝; mso-fareast-theme-font:minor-fareast; mso-hansi-font-family:游明朝; mso-hansi-theme-font:minor-latin; mso-font-kerning:1.0pt;}
This article presents a miniature pole-climbing piezoelectric robot (MPCPR) with fast and load-towable movement. Basically, it incorporates a pair of alumina transducers, where the 3rd bending (B3) and 2nd bending (B2) vibrations are excited independently in the time domain to enable the MPCPR to climb up and down the external tubes; this interestingly imitates the squirrel’s galloping gait when it climbs trees. First, the transducer was structurally optimized by constructing a Krimhertz-transmission-theory-based model to enhance the driving-force-to-weight ratio. Then, a prototype 60 × 60 × 60 mm3 in size and 40.2 g in weight was fabricated and its climbing/towing/positioning performance was assessed. At 37.22 kHz working frequency and 30 V voltage, the MPCPR produced the maximal climbing-up speed of 183.2 mm/s and the maximal towing weight of 225 g (equal to 5.6 times its self-weight). It could climb up the tubes in circular/rectangular shapes, whose diameters/lengths are in the range of 12–28 mm. In stepping operation, it yielded the minimal step displacement of 0.32 μm. This article validates the MPCPR’s high climbing/towing capability and offers an approach to design powerful piezoelectric robots with the function of vertically climbing up external tubes.
More from this Author