Datasets
Standard Dataset
U2sonobot-vers 2

- Citation Author(s):
- Submitted by:
- Jiang Wu
- Last updated:
- Tue, 01/30/2024 - 08:34
- DOI:
- 10.21227/3w37-h209
- Data Format:
- License:
 89 Views
89 Views- Categories:
- Keywords:
Abstract
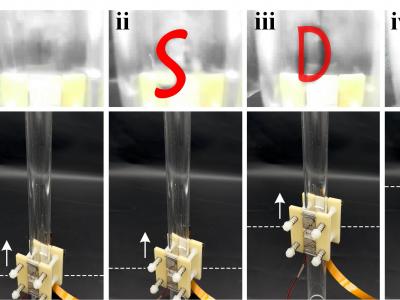
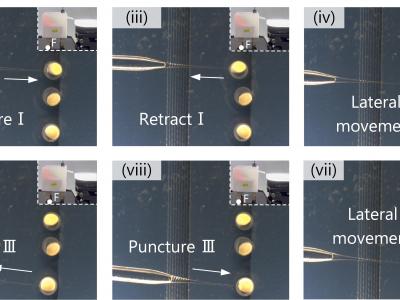
An untethered ultrasonic robot (U2sonobot) operating in resonant vibration is developed by integrating dual transducers, an onboard circuit, and a battery. Here, the longitudinal and bending vibrations lead to the out-of-phase swing motion and the alternating acceleration, respectively; these imitate the rotatory galloping gait in terms of the driving feet’s movement pattern and the operating sequence. First, the transducers were designed to gather the resonant frequencies of two vibrations and produce the same node for steadily supporting the other components. Second, an onboard circuit was devised to convert the 3.7 V battery’s DC signal into multi-channels of ultrasonic signals via multi-level amplification. Third, a prototype 54 × 52 × 46 mm3 in size and 76.5 g in weight was fabricated to assess its moving/carrying performance. At 59.3 kHz frequency, U2sonobot yielded the maximal speed of 221 mm/s and the minimal step displacement of 0.3 μm. According to the wirelessly-received commands, it produced various types of flexible movements (e.g., those with adjustable speed/steering-radii and in-situ rotations) and climbed 8.9° slope. Moreover, it carried the maximal payload of 520 g and provided the minimal cost of transport of 3.9. U2sonobot accomplishes fast and load-carriable movements, implying its potentially applicability to optical focusing/scanning system.
An untethered ultrasonic robot (U2sonobot) operating in resonant vibration is developed by integrating dual transducers, an onboard circuit, and a battery. Here, the longitudinal and bending vibrations lead to the out-of-phase swing motion and the alternating acceleration, respectively; these imitate the rotatory galloping gait in terms of the driving feet’s movement pattern and the operating sequence. First, the transducers were designed to gather the resonant frequencies of two vibrations and produce the same node for steadily supporting the other components. Second, an onboard circuit was devised to convert the 3.7 V battery’s DC signal into multi-channels of ultrasonic signals via multi-level amplification. Third, a prototype 54 × 52 × 46 mm3 in size and 76.5 g in weight was fabricated to assess its moving/carrying performance. At 59.3 kHz frequency, U2sonobot yielded the maximal speed of 221 mm/s and the minimal step displacement of 0.3 μm. According to the wirelessly-received commands, it produced various types of flexible movements (e.g., those with adjustable speed/steering-radii and in-situ rotations) and climbed 8.9° slope. Moreover, it carried the maximal payload of 520 g and provided the minimal cost of transport of 3.9. U2sonobot accomplishes fast and load-carriable movements, implying its potentially applicability to optical focusing/scanning system.