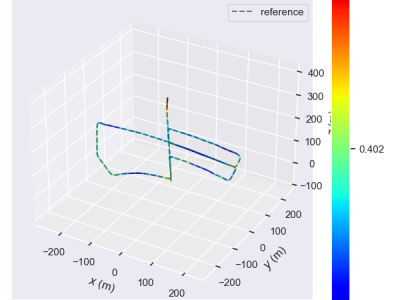
Estimated trajectory data from our work
- Citation Author(s):
-
Lin ZhihaoZhang QiTian ZhenYu PeizhuoLan Jianglin
- Submitted by:
- Zhang Qi
- Last updated:
- DOI:
- 10.21227/bjf4-6y15
- Data Format:
 103 views
103 views
Abstract
This dataset was used to support our work and provided to the review for reference.
The TUM RGB-D dataset comprises image sequences from dynamic indoor settings, containing various line densities and scene dynamics conducive for SLAM analysis. We selected four walking and two sitting sequences to demonstrate high and low dynamics, respectively. The walking sequences (w/half, w/rpy, w/static, w/xyz) capture two individuals in motion, including chair movement, while the sitting sequences (s/half, s/xyz) document two individuals in conversation with minimal movements. The appended terms `half', `rpy', `static', and `xyz' specify different camera movements.
The KITTI dataset consists of images in natural and urban outdoor settings. The KITTI dataset is a collection of images captured in varied natural and urban outdoor environments. Our research specifically zeroes in on sequences 00 to 10, all of which supply us with verified ground truth data. The sequences we've chosen for analysis are characterized by their unique mix of traffic density and the prevalence of man-made structures. By conducting a comprehensive examination of these sequences, we are able to gauge the effectiveness and robustness of our DPL-SLAM system across an array of different driving environments.
Instructions:
evo_traj tum traj_1.txt traj_2.txt traj_3.txt
You can show the trajectories according to the below website
https://github.com/MichaelGrupp/evo/wiki/evo_traj







