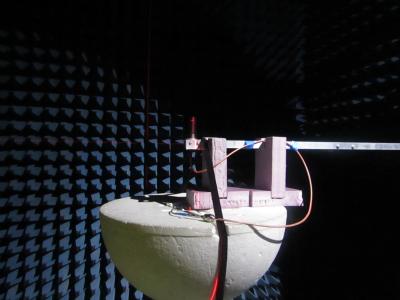
3D antenna pattern measurement by using RF anechoic chamber. Both an AERPAW fixed node antenna and an AERPAW portable node antenna are measured.
- Categories:
3D antenna pattern measurement by using RF anechoic chamber. Both an AERPAW fixed node antenna and an AERPAW portable node antenna are measured.

In this dataset, we conducted a spectrum monitoring experiment in an urban environment. The helikite flies up to an altitude of 400 feet throughout the day from noon to 9 p.m. during NC State’s Packapalooza festival in August, 2022. The spectrum is swept up to 6 GHz. Every sweep takes around 1 minute, while after every 4 measurements, the 5th measurement takes close to 5 minutes due to another data collection activity running in parallel. The photo of a flying Helikite at the experiment site is shown in the dataset image.

In this dataset, we conduct the spectrum monitoring experiment in AERPAW Lake Wheeler site, which can be classified as a rural area. The helikite flies up to an altitude of 500 feet at increments of 10 meters, while waiting for 5 minutes in between altitude changes. The spectrum is monitored up to 6~GHz. The trajectory of the helikite mapped on top of the experiment site during the flight is in the dataset image. Small random variations in altitude due to wind can also be observed.

Recently, unmanned aerial vehicles (UAVs) have been receiving significant attention due to the wide range of potential application areas. To support UAV use cases with beyond visual line of sight (BVLOS) and autonomous flights, cellular networks can provide connectivity points to UAVs and provide remote control and payload communications. However, there are limited datasets to study the coverage of cellular technologies for UAV flights at different altitudes.
Extensive use of unmanned aerial vehicles (UAVs) is expected to raise privacy and security concerns among individuals and
communities. In this context, detection and localization of UAVs will be critical for maintaining safe and secure airspace in the
future. In this work, Keysight N6854A radio frequency (RF) sensors are used to detect and locate a UAV by passively monitoring
the signals emitted from the UAV. First, the Keysight sensor detects the UAV by comparing the received RF signature with various