Stereo mathing real scenes
- Citation Author(s):
-
Liang Bifa
- Submitted by:
- Bifa Liang
- Last updated:
- DOI:
- 10.21227/nkgq-xn90
 20 views
20 views
- Categories:
- Keywords:
Abstract
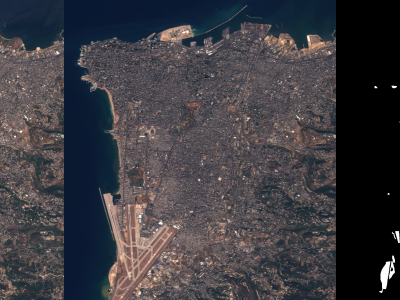
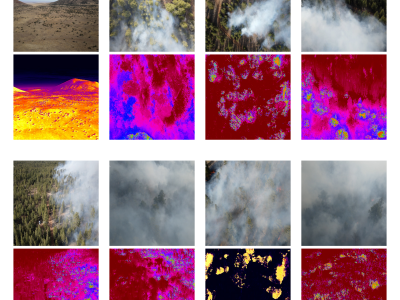
To evaluate SARNet’s generalization, we captured a real-world stereo dataset in Guangzhou using a binocular camera. The dataset includes diverse urban and natural scenes to assess SARNet’s performance beyond synthetic and benchmark datasets. Fig. 7 illustrates SARNet’s predictions on real-world scenes, KITTI 2012, and KITTI 2015. Experimental results demonstrate that SARNet generates clear and consistent disparity maps across both smooth and complex regions, highlighting its robustness in real-world depth estimation tasks. The dataset is publicly available on IEEE DataPort to support further research in stereo matching and autonomous perception.
Instructions:
1. Dataset Overview
The SARNet Real-World Stereo Dataset was captured in Guangzhou, China, using a binocular stereo camera. It includes diverse urban and natural scenes to evaluate SARNet’s generalization beyond synthetic and benchmark datasets. The dataset provides high-quality stereo image pairs for real-world depth estimation research.
2. File Structure
The dataset is organized as follows:
bash
/real_scenes
│── /left/ # Left view stereo images
│── /right/ # Right view stereo images
Each folder contains 1 image, named as follows:
- 000000_10.png
3. Data Format
- Stereo Image Pairs:
- Format: .png
- Resolution: [Specify resolution, e.g., 1920x1080]
- Naming Convention:
- left/000000_10.png → Left image
- right/000000_10.png → Right image
4. Instructions for Using the Dataset
- Download and Extract:
- Download the dataset from IEEE DataPort.
- Extract all files to the desired directory.
- Reading Stereo Image Pairs:
- Use OpenCV or PIL to read the left and right images.
python
import cv2
left_img = cv2.imread('real_scenes/left/000000_10.png')
right_img = cv2.imread('real_scenes/right/000000_10.png')
- Stereo Matching & Disparity Estimation:
- Apply stereo matching algorithms (e.g., SARNet, SGM, or OpenCV’s StereoBM) on the image pairs to compute disparity maps.
5. Citation
If you use this dataset in your research, please cite:
SARNet Real-World Stereo Dataset
Title: [High-Precision Stereo Matching Based on Selective Attention and Residual Cost Aggregation for Real-Time Autonomous Driving on Edge Devices]
Authors: [Bifa Liang], [Sun Yat-sen University]