Stereo mathing real scenes
- Citation Author(s):
-
Liang Bifa
- Submitted by:
- Bifa Liang
- Last updated:
- DOI:
- 10.21227/ahnt-ez90
 17 views
17 views
- Categories:
- Keywords:
Abstract
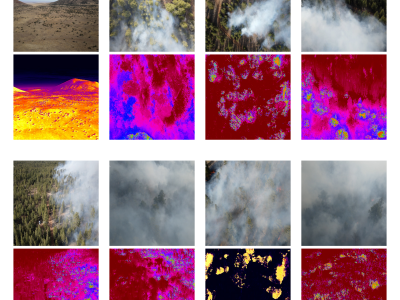
To evaluate SARNet’s generalization, we captured a real-world stereo dataset in Guangzhou using a binocular camera. The dataset includes diverse urban and natural scenes to assess SARNet’s performance beyond synthetic and benchmark datasets. Fig. 7 illustrates SARNet’s predictions on real-world scenes, KITTI 2012, and KITTI 2015. Experimental results demonstrate that SARNet generates clear and consistent disparity maps across both smooth and complex regions, highlighting its robustness in real-world depth estimation tasks. The dataset is publicly available on IEEE DataPort to support further research in stereo matching and autonomous perception.
Instructions:
The SARNet Real-World Stereo Dataset was captured in Guangzhou, China, using a binocular stereo camera. It includes diverse urban and natural scenes to evaluate SARNet’s generalization beyond synthetic and benchmark datasets. The dataset provides high-quality stereo image pairs for real-world depth estimation research.