Datasets
Standard Dataset
High Accuracy Three-Dimensional Environment-Aware Indoor Visible Light Positioning Algorithm
- Citation Author(s):
-
YanqiHuang
 DRIVE laboratory, Univ. Bourgogne, F58000, Nevers, France
DRIVE laboratory, Univ. Bourgogne, F58000, Nevers, France - Submitted by:
- Yanqi Huang
- Last updated:
- Thu, 08/03/2023 - 09:25
- DOI:
- 10.21227/6k5c-ke35
- Data Format:
- License:
 133 Views
133 ViewsAbstract
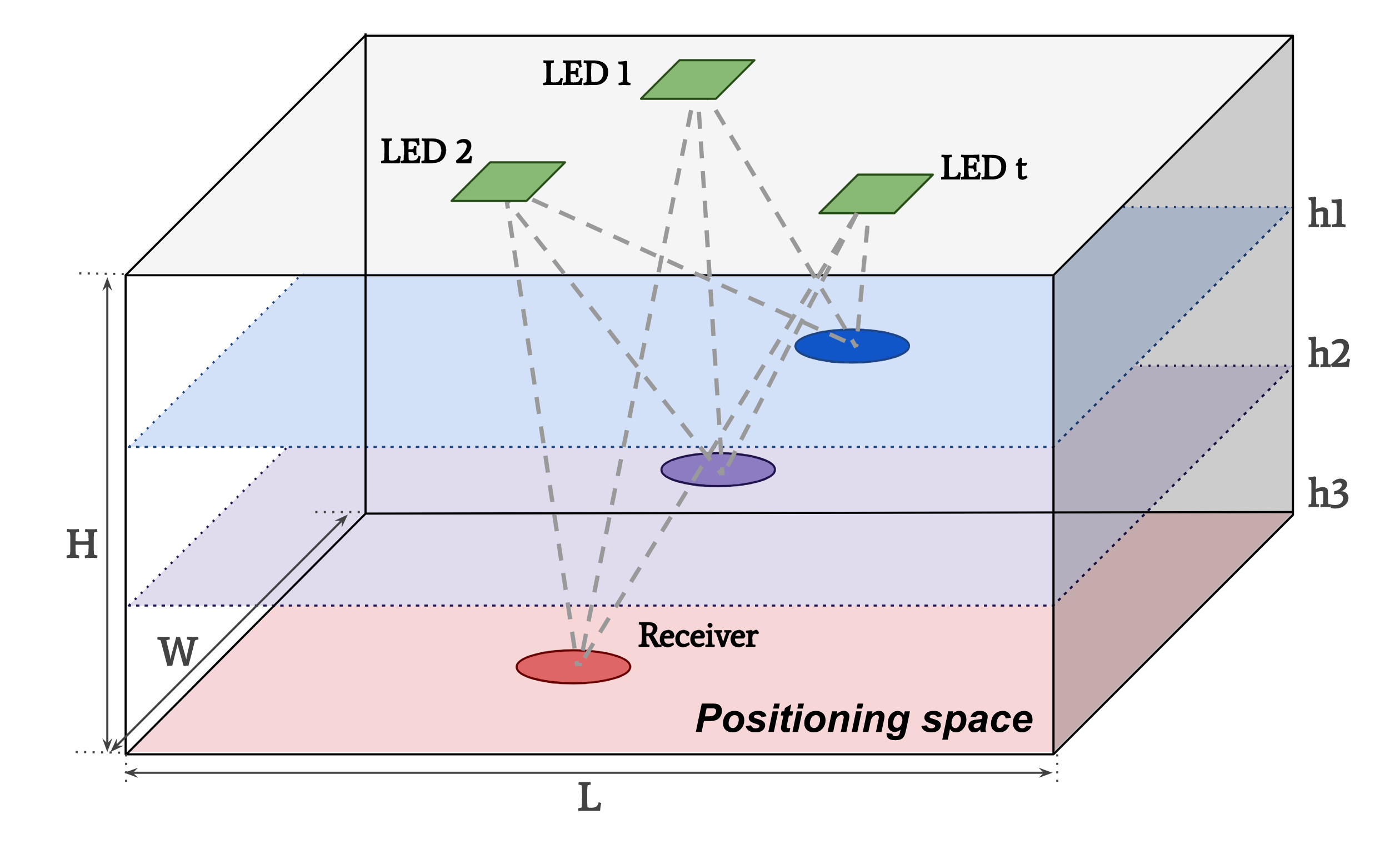
With the growth of Internet of Things (IoT) applications, the need for accurate indoor positioning systems (IPS) has become urgent. While GPS has limitations in indoor scenarios, Visible Light Positioning (VLP) presents promising results. This paper addresses the challenge of estimating the receiver's height in three-dimensional (3D) positioning scenarios, a crucial problem in VLP. We propose a novel 3D VLP algorithm, adopting a multiple estimation strategy for height estimation to minimize random errors. Simulation results demonstrate an over 80\% accuracy in height estimation, peaking near 90\% for certain heights. The algorithm shows enhanced 3D positioning accuracy when the receiver is closer to the ground, indicating its versatility. Moreover, 90\% of positioning errors were less than 4.59 cm, affirming the high precision of the algorithm. This research contributes to the ongoing quest for reliable 3D VLP, pushing the current boundaries in this rapidly evolving field.
With the growth of Internet of Things (IoT) applications, the need for accurate indoor positioning systems (IPS) has become urgent. While GPS has limitations in indoor scenarios, Visible Light Positioning (VLP) presents promising results. This paper addresses the challenge of estimating the receiver's height in three-dimensional (3D) positioning scenarios, a crucial problem in VLP. We propose a novel 3D VLP algorithm, adopting a multiple estimation strategy for height estimation to minimize random errors. Simulation results demonstrate an over 80\% accuracy in height estimation, peaking near 90\% for certain heights. The algorithm shows enhanced 3D positioning accuracy when the receiver is closer to the ground, indicating its versatility. Moreover, 90\% of positioning errors were less than 4.59 cm, affirming the high precision of the algorithm. This research contributes to the ongoing quest for reliable 3D VLP, pushing the current boundaries in this rapidly evolving field.






Comments
need dataset
Hi ! How ca i get the dataset and all other information available about it?