Coordinated UAVs for payload delivery
- Citation Author(s):
-
Rodolfo Vera-Amaro
 (Instituto Politécnico Nacional (SEPI-UPIITA-IPN))
Madison Burke (Department of Electrical and Computer Engineering, Virginia Tech)Walid Saad (Department of Electrical and Computer Engineering, Virginia Tech)
(Instituto Politécnico Nacional (SEPI-UPIITA-IPN))
Madison Burke (Department of Electrical and Computer Engineering, Virginia Tech)Walid Saad (Department of Electrical and Computer Engineering, Virginia Tech) - Submitted by:
- Rodolfo Vera-amaro
- Last updated:
- DOI:
- 10.21227/xz3s-v509
 1024 views
1024 views
- Categories:
- Keywords:
Abstract
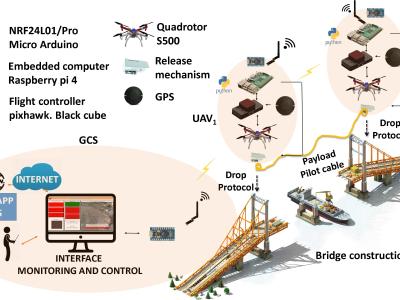
In recent years, drones have been used to transport payloads to remote and difficult access areas. A payload delivery with assisted relay system of two unmanned aerial vehicles (UAVs) is implemented. A local and web remote monitoring and control from a ground control station (GCS) for a pre-planned autonomous trajectory flight is developed in this work. Two autonomously guided and coordinated UAVs are used to transport a payload at this remote area, a number of target points were manually selected by user and monitoring the spacing between drones in real time at local or remote GCS with an autonomously (or manually) coordinated drop delivery system control. A custom communication protocol is implemented to use one drone as a relay between the GCS and the second UAV between agents. Cable material payload delivery for bridge construction is selected as the case study in real-world experiments conducted at the Virginia Tech Drone Park. Our experimental results show how system delivery performs and what adjustments and improvements need to be done for future work.
Instructions:
In this datasets are attached the UAVs telemetry data, the paper, and video of the demo of the VTS 2021 UAV competition.
for project
Yasir Ijaz
Fri, 04/01/2022 - 13:18
Permalink
For studies
Kausthubha Bhat
Thu, 09/15/2022 - 07:04
Permalink






