Autonomous Vehicle dataset for Anomaly detection
- Citation Author(s):
-
Harshith Pallapothu (Dept of CSE, PES University)Gopi Krishna G (Dept of CSE, PES University)Digvijay Sunil (Dept of CSE, PES University)Teja Yadav S (Dept of CSE, PES University)Nagasundari S
 (Center for Information Security, Forensics and Cyber Resilience, Dept of CSE, PES University)
(Center for Information Security, Forensics and Cyber Resilience, Dept of CSE, PES University)
- Submitted by:
- Nagasundari S
- Last updated:
- DOI:
- 10.21227/0q64-5f96
- Data Format:
 987 views
987 views
- Categories:
- Keywords:
Abstract
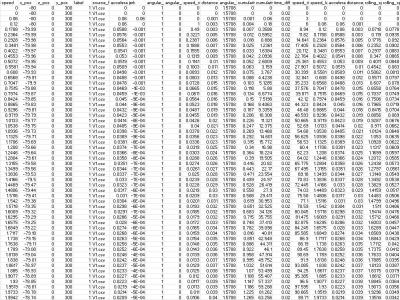
This dataset was developed using the MOBATSim simulator in MATLAB 2020b, designed to mimic real-world autonomous vehicle (AV) environments. It focuses on providing high-quality data for research in anomaly detection and cybersecurity, particularly addressing False Data Injection Attacks (FDIA). The dataset includes comprehensive sensor information, such as speed, rotational movements, positional coordinates, and labelled attack data, enabling supervised learning. With diverse driving scenarios—urban, highway, and obstacle-laden environments—the dataset is tailored for various AV applications, including navigation algorithms, cybersecurity model validation, and feature engineering. Its modular and scalable structure, formatted in CSV, ensures easy integration into machine learning pipelines and serves as a valuable resource for advancing intelligent transportation systems and AV cybersecurity research.
Instructions:
- Simulation Environment: Use MATLAB 2020b with the MOBATSim toolbox to generate additional data or replicate the simulation setup.
- Install MOBATSim: Ensure MOBATSim is installed and added to the MATLAB path for proper simulation of autonomous vehicle environments.
- Simulation Scenarios: Configure MOBATSim to simulate specific driving conditions such as urban environments, highways, or obstacle-laden roads.
- Sensor Suite Setup: Define the autonomous vehicle’s sensor suite in MOBATSim, including inertial navigation systems for rotational, speed, and positional data collection.
- Data Export: After running simulations, export the raw sensor data using MATLAB scripts into CSV format.
- Label the Data: Use simulation logs to manually label data for anomalies or attacks (e.g., 0 for normal and 1 for FDIA).
- Feature Engineering: Use MATLAB or Python to enhance the raw data with derived features like acceleration, jerk, and angular velocity for machine learning applications.
- Data Validation: Ensure the dataset is clean by checking for missing values or inconsistencies and normalizing the data for analysis.
- Testing and Research: Use the dataset for tasks such as anomaly detection, navigation algorithm validation, or cybersecurity testing in autonomous systems.
- Expand Dataset: Future users can modify MOBATSim parameters to generate additional data for new driving conditions or attack scenarios.







share with me