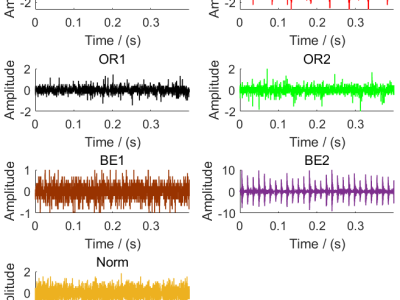
The dataset image is the time-domain waveforms of the 7 fault states of the rolling bearing vibration signal, which provide research data for subsequent data processing and feature extraction.
- Categories:
The dataset image is the time-domain waveforms of the 7 fault states of the rolling bearing vibration signal, which provide research data for subsequent data processing and feature extraction.

This dataset consists of the training and the evaluation datasets for the LiDAR-based maritime environment perception presented in our journal publication "Maritime Environment Perception based on Deep Learning." Within the datasets, LiDAR raw data are processed using Deep Neural Networks (DNN). In the training dataset, we introduce the method for generating training data in Gazebo simulation. In the evaluation datasets, we provide the real-world tests conducted by two research vessels, respectively.