Datasets & Competitions
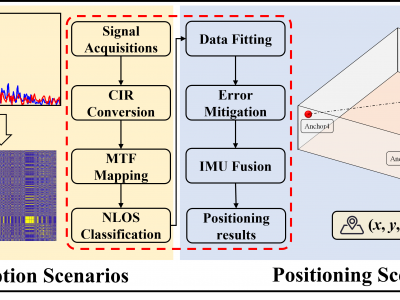
The overall process of UWB technology-based signal preprocessing and high-precision localization system architecture can be divided into two complementary modules: perception and localization. In “Sensing Scene”, the system firstly collects the CIR data generated in the environment through UWB sensors, and applies signal conversion and multi-dimensional feature mapping methods to analyze the signal attenuation characteristics of different NLOS environments, so as to realize the segmentation of the NLOS scene.
- Categories:
 200 Views
200 Views